-
1 масштабирование по времени работы на аккумуляторах
масштабирование по времени работы на аккумуляторах
-Параллельные тексты EN-RU
Scalable Runtime
Additional Battery Modules increase runtime.
Modules are added or moved while systems are running and protected.
Масштабирование по времени работы на аккумуляторах
Увеличение времени работы на аккумуляторах достигается установкой дополнительных батарейных модулей. Установка и удаление модулей осуществляются без прерывания нормальной работы защищаемых систем и при сохранении их защищенности.
Тематики
EN
Русско-английский словарь нормативно-технической терминологии > масштабирование по времени работы на аккумуляторах
-
2 time-stand
координация ( модулей по времени); синхронизация ( путём приостановки)Англо-русский словарь промышленной и научной лексики > time-stand
-
3 программируемый логический контроллер
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего. Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы. Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7. Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series. Рис. 4. Резервированный контроллер FCP270.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA). Рис. 5. Контроллер AC800M.
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Русско-английский словарь нормативно-технической терминологии > программируемый логический контроллер
4 человеко-машинный интерфейс
- operator-machine communication
- MMI
- man-machine interface
- man-machine communication
- human-machine interface
- human-computer interface
- human interface device
- human interface
- HMI
- computer human interface
- CHI
человеко-машинный интерфейс (ЧМИ)
Технические средства, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование.
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства, дисплеи.
[ ГОСТ Р МЭК 60447-2000]
человекомашинный интерфейс (ЧМИ)
Технические средства контроля и управления, являющиеся частью оборудования, предназначенные для обеспечения непосредственного взаимодействия между оператором и оборудованием и дающие возможность оператору управлять оборудованием и контролировать его функционирование (ГОСТ Р МЭК 60447).
Примечание
Такие средства могут включать приводимые в действие вручную органы управления, контрольные устройства и дисплеи.
[ ГОСТ Р МЭК 60073-2000]
человеко-машинный интерфейс
Средства обеспечения двусторонней связи "оператор - технологическое оборудование" (АСУ ТП). Название класса средств, в который входят подклассы:
SCADA (Supervisory Control and Data Acquisition) - Операторское управление и сбор данных от технологического оборудования.
DCS (Distributed Control Systems) - Распределенная система управления технологическим оборудованием.
[ http://www.morepc.ru/dict/]Параллельные тексты EN-RU
MotorSys™ iPMCC solutions can integrate a dedicated human-machine interface (HMI) or communicate via a personal computer directly on the motor starters.
[Schneider Electric]Интеллектуальный центр распределения электроэнергии и управления электродвигателями MotorSys™ может иметь в своем составе специальный человеко-машинный интерфейс (ЧМИ). В качестве альтернативы используется обмен данным между персональным компьютером и пускателями.
[Перевод Интент]
HMI на базе операторских станций
Самое, пожалуй, главное в системе управления - это организация взаимодействия между человеком и программно-аппаратным комплексом. Обеспечение такого взаимодействия и есть задача человеко-машинного интерфейса (HMI, human machine interface).
На мой взгляд, в аббревиатуре “АСУ ТП” ключевым является слово “автоматизированная”, что подразумевает непосредственное участие человека в процессе реализации системой определенных задач. Очевидно, что чем лучше организован HMI, тем эффективнее человек сможет решать поставленные задачи.
Как же организован HMI в современных АСУ ТП?
Существует, как минимум, два подхода реализации функционала HMI:- На базе специализированных рабочих станций оператора, устанавливаемых в центральной диспетчерской;
- На базе панелей локального управления, устанавливаемых непосредственно в цеху по близости с контролируемым технологическим объектам.
Иногда эти два варианта комбинируют, чтобы достичь наибольшей гибкости управления. В данной статье речь пойдет о первом варианте организации операторского уровня.
Аппаратно рабочая станция оператора (OS, operator station) представляет собой ни что иное как персональный компьютер. Как правило, станция снабжается несколькими широкоэкранными мониторами, функциональной клавиатурой и необходимыми сетевыми адаптерами для подключения к сетям верхнего уровня (например, на базе Industrial Ethernet). Станция оператора несколько отличается от привычных для нас офисных компьютеров, прежде всего, своим исполнением и эксплуатационными характеристиками (а также ценой 4000 - 10 000 долларов).
На рисунке 1 изображена рабочая станция оператора системы SIMATIC PCS7 производства Siemens, обладающая следующими техническими характеристиками:
Процессор: Intel Pentium 4, 3.4 ГГц;
Память: DDR2 SDRAM до 4 ГБ;
Материнская плата: ChipSet Intel 945G;
Жесткий диск: SATA-RAID 1/2 x 120 ГБ;
Слоты: 4 x PCI, 2 x PCI E x 1, 1 x PCI E x 16;
Степень защиты: IP 31;
Температура при эксплуатации: 5 – 45 C;
Влажность: 5 – 95 % (без образования конденсата);
Операционная система: Windows XP Professional/2003 Server.
Рис. 1. Пример промышленной рабочей станции оператора.Системный блок может быть как настольного исполнения ( desktop), так и для монтажа в 19” стойку ( rack-mounted). Чаще применяется второй вариант: системный блок монтируется в запираемую стойку для лучшей защищенности и предотвращения несанкционированного доступа.
Какое программное обеспечение используется?
На станции оператора устанавливается программный пакет визуализации технологического процесса (часто называемый SCADA). Большинство пакетов визуализации работают под управлением операционных систем семейства Windows (Windows NT 4.0, Windows 2000/XP, Windows 2003 Server), что, на мой взгляд, является большим минусом.
Программное обеспечение визуализации призвано выполнять следующие задачи:- Отображение технологической информации в удобной для человека графической форме (как правило, в виде интерактивных мнемосхем) – Process Visualization;
- Отображение аварийных сигнализаций технологического процесса – Alarm Visualization;
- Архивирование технологических данных (сбор истории процесса) – Historical Archiving;
- Предоставление оператору возможности манипулировать (управлять) объектами управления – Operator Control.
- Контроль доступа и протоколирование действий оператора – Access Control and Operator’s Actions Archiving.
- Автоматизированное составление отчетов за произвольный интервал времени (посменные отчеты, еженедельные, ежемесячные и т.д.) – Automated Reporting.
Как правило, SCADA состоит из двух частей:
- Среды разработки, где инженер рисует и программирует технологические мнемосхемы;
- Среды исполнения, необходимой для выполнения сконфигурированных мнемосхем в режиме runtime. Фактически это режим повседневной эксплуатации.
Существует две схемы подключения операторских станций к системе управления, а точнее уровню управления. В рамках первой схемы каждая операторская станция подключается к контроллерам уровня управления напрямую или с помощью промежуточного коммутатора (см. рисунок 2). Подключенная таким образом операторская станция работает независимо от других станций сети, и поэтому часто называется одиночной (пусть Вас не смущает такое название, на самом деле таких станций в сети может быть несколько).

Рис. 2. Схема подключения одиночных операторских станций к уровню управления.Есть и другой вариант. Часто операторские станции подключают к серверу или резервированной паре серверов, а серверы в свою очередь подключаются к промышленным контроллерам. Таким образом, сервер, являясь неким буфером, постоянно считывает данные с контроллера и предоставляет их по запросу рабочим станциям. Станции, подключенные по такой схеме, часто называют клиентами (см. рисунок 3).
Как происходит информационный обмен?
Рис. 3. Клиент-серверная архитектура операторского уровня.
Для сопряжения операторской станции с промышленным контроллером на первой устанавливается специальное ПО, называемое драйвером ввода/вывода. Драйвер ввода/вывода поддерживает совместимый с контроллером коммуникационный протокол и позволяет прикладным программам считывать с контроллера параметры или наоборот записывать в него. Пакет визуализации обращается к драйверу ввода/вывода каждый раз, когда требуется обновление отображаемой информации или запись измененных оператором данных. Для взаимодействия пакета визуализации и драйвера ввода/вывода используется несколько протоколов, наиболее популярные из которых OPC (OLE for Process Control) и NetDDE (Network Dynamic Data Exchange). Обобщенно можно сказать, что OPC и NetDDE – это протоколы информационного обмена между различными приложениями, которые могут выполняться как на одном, так и на разных компьютерах. На рисунках 4 и 5 изображено, как взаимодействуют программные компоненты при различных схемах построения операторского уровня.
Рис. 4. Схема взаимодействия программных модулей при использовании одиночных станций.
Рис. 5. Схема взаимодействия программных модулей при использовании клиент-серверной архитектуры.
Как выглядит SCADA?
Разберем простой пример. На рисунке 6 приведена абстрактная схема технологического процесса, хотя полноценным процессом это назвать трудно. Рис. 6. Пример операторской мнемосхемы.
Рис. 6. Пример операторской мнемосхемы.
На рисунке 6 изображен очень упрощенный вариант операторской мнемосхемы для управления тех. процессом. Как видно, резервуар (емкость) наполняется водой. Задача системы - нагреть эту воду до определенной температуры. Для нагрева воды используется газовая горелка. Интенсивность горения регулируется клапаном подачи газа. Также должен быть насос для закачки воды в резервуар и клапан для спуска воды.
На мнемосхеме отображаются основные технологические параметры, такие как: температура воды; уровень воды в резервуаре; работа насосов; состояние клапанов и т.д. Эти данные обновляются на экране с заданной частотой. Если какой-либо параметр достигает аварийного значения, соответствующее поле начинает мигать, привлекая внимание оператора.
Сигналы ввода/вывода и исполнительные механизмы отображаются на мнемосхемах в виде интерактивных графических символов (иконок). Каждому типу сигналов и исполнительных механизмов присваивается свой символ: для дискретного сигнала это может быть переключатель, кнопка или лампочка; для аналогового – ползунок, диаграмма или текстовое поле; для двигателей и насосов – более сложные фейсплейты ( faceplates). Каждый символ, как правило, представляет собой отдельный ActiveX компонент. Вообще технология ActiveX широко используется в SCADA-пакетах, так как позволяет разработчику подгружать дополнительные символы, не входящие в стандартную библиотеку, а также разрабатывать свои собственные графические элементы, используя высокоуровневые языки программирования.
Допустим, оператор хочет включить насос. Для этого он щелкает по его иконке и вызывает панель управления ( faceplate). На этой панели он может выполнить определенные манипуляции: включить или выключить насос, подтвердить аварийную сигнализацию, перевести его в режим “техобслуживания” и т.д. (см. рисунок 7). Рис. 7. Пример фейсплейта для управления насосом.Оператор также может посмотреть график изменения интересующего его технологического параметра, например, за прошедшую неделю. Для этого ему надо вызвать тренд ( trend) и выбрать соответствующий параметр для отображения. Пример тренда реального времени показан на рисунке 8.
Рис. 7. Пример фейсплейта для управления насосом.Оператор также может посмотреть график изменения интересующего его технологического параметра, например, за прошедшую неделю. Для этого ему надо вызвать тренд ( trend) и выбрать соответствующий параметр для отображения. Пример тренда реального времени показан на рисунке 8.
 Рис. 8. Пример отображения двух параметров на тренде реального времени.
Рис. 8. Пример отображения двух параметров на тренде реального времени.
Для более детального обзора сообщений и аварийных сигнализаций оператор может воспользоваться специальной панелью ( alarm panel), пример которой изображен на рисунке 9. Это отсортированный список сигнализаций (alarms), представленный в удобной для восприятия форме. Оператор может подтвердить ту или иную аварийную сигнализацию, применить фильтр или просто ее скрыть. Рис. 9. Панель сообщений и аварийных сигнализаций.
Рис. 9. Панель сообщений и аварийных сигнализаций.
Говоря о SCADA, инженеры часто оперируют таким важным понятием как “тэг” ( tag). Тэг является по существу некой переменной программы визуализации и может быть использован как для локального хранения данных внутри программы, так и в качестве ссылки на внешний параметр процесса. Тэги могут быть разных типов, начиная от обычных числовых данных и кончая структурой с множеством полей. Например, один визуализируемый параметр ввода/вывода – это тэг, или функциональный блок PID-регулятора, выполняемый внутри контроллера, - это тоже тэг. Ниже представлена сильно упрощенная структура тэга, соответствующего простому PID-регулятору:
Tag Name = “MyPID”;
Tag Type = PID;
Fields (список параметров):
MyPID.OP
MyPID.SP
MyPID.PV
MyPID.PR
MyPID.TI
MyPID.DI
MyPID.Mode
MyPID.RemoteSP
MyPID.Alarms и т.д.
В комплексной прикладной программе может быть несколько тысяч тэгов. Производители SCADA-пакетов это знают и поэтому применяют политику лицензирования на основе количества используемых тэгов. Каждая купленная лицензия жестко ограничивает суммарное количество тэгов, которые можно использовать в программе. Очевидно, чем больше тегов поддерживает лицензия, тем дороже она стоит; так, например, лицензия на 60 000 тэгов может обойтись в 5000 тыс. долларов или даже дороже. В дополнение к этому многие производители SCADA формируют весьма существенную разницу в цене между “голой” средой исполнения и полноценной средой разработки; естественно, последняя с таким же количеством тэгов будет стоить заметно дороже.
Сегодня на рынке представлено большое количество различных SCADA-пакетов, наиболее популярные из которых представлены ниже:
1. Wonderware Intouch;
2. Simatic WinCC;
3. Iconics Genesis32;
4. Citect;
5. Adastra Trace Mode
Лидирующие позиции занимают Wonderware Intouch (производства Invensys) и Simatic WinCC (разработки Siemens) с суммарным количеством инсталляций более 80 тыс. в мире. Пакет визуализации технологического процесса может поставляться как в составе комплексной системы управления, так и в виде отдельного программного продукта. В последнем случае SCADA комплектуется набором драйверов ввода/вывода для коммуникации с контроллерами различных производителей. [ http://kazanets.narod.ru/HMI_PART1.htm]Тематики
- автоматизация, основные понятия
- автоматизированные системы
Синонимы
EN
Русско-английский словарь нормативно-технической терминологии > человеко-машинный интерфейс
5 SCADA
SCADA
SCADA-система
диспетчерское управление и сбор данных
ПО, предназначенное для поддержки средств автоматизации и построения систем промышленной автоматизации.
[ http://www.morepc.ru/dict/]SCADA (аббр. от англ. supervisory control and data acquisition, диспетчерское управление и сбор данных) — программный пакет, предназначенный для разработки или обеспечения работы в реальном времени систем сбора, обработки, отображения и архивирования информации об объекте мониторинга или управления. SCADA может являться частью АСУ ТП, АСКУЭ, системы экологического мониторинга, научного эксперимента, автоматизации здания и т. д. SCADA-системы используются во всех отраслях хозяйства, где требуется обеспечивать операторский контроль за технологическими процессами в реальном времени. Данное программное обеспечение устанавливается на компьютеры и, для связи с объектом, использует драйверы ввода-вывода или OPC/DDE серверы. Программный код может быть как написан на языке программирования (например на C++), так и сгенерирован в среде проектирования.
Иногда SCADA-системы комплектуются дополнительным ПО для программирования промышленных контроллеров. Такие SCADA-системы называются интегрированными и к ним добавляют термин SoftLogic.
Термин «SCADA» имеет двоякое толкование. Наиболее широко распространено понимание SCADA как приложения[2], то есть программного комплекса, обеспечивающего выполнение указанных функций, а также инструментальных средств для разработки этого программного обеспечения. Однако, часто под SCADA-системой подразумевают программно-аппаратный комплекс. Подобное понимание термина SCADA более характерно для раздела телеметрия.
Значение термина SCADA претерпело изменения вместе с развитием технологий автоматизации и управления технологическими процессами. В 80-е годы под SCADA-системами чаще понимали программно-аппаратные комплексы сбора данных реального времени. С 90-х годов термин SCADA больше используется для обозначения только программной части человеко-машинного интерфейса АСУ ТП.Основные задачи, решаемые SCADA-системами
SCADA-системы решают следующие задачи:- Обмен данными с «устройствами связи с объектом», то есть с промышленными контроллерами и платами ввода/вывода) в реальном времени через драйверы.
- Обработка информации в реальном времени.
- Логическое управление.
- Отображение информации на экране монитора в удобной и понятной для человека форме.
- Ведение базы данных реального времени с технологической информацией.
- Аварийная сигнализация и управление тревожными сообщениями.
- Подготовка и генерирование отчетов о ходе технологического процесса.
- Осуществление сетевого взаимодействия между SCADA ПК.
- Обеспечение связи с внешними приложениями (СУБД, электронные таблицы, текстовые процессоры и т. д.). В системе управления предприятием такими приложениями чаще всего являются приложения, относимые к уровню MES.
SCADA-системы позволяют разрабатывать АСУ ТП в клиент-серверной или в распределённой архитектуре.
Основные компоненты SCADA
SCADA—система обычно содержит следующие подсистемы:- Драйверы или серверы ввода-вывода — программы, обеспечивающие связь SCADA с промышленными контроллерами, счётчиками, АЦП и другими устройствами ввода-вывода информации.
- Система реального времени — программа, обеспечивающая обработку данных в пределах заданного временного цикла с учетом приоритетов.
- Человеко-машинный интерфейс (HMI, англ. Human Machine Interface) — инструмент, который представляет данные о ходе процесса человеку оператору, что позволяет оператору контролировать процесс и управлять им. Программа-редактор для разработки человеко-машинного интерфейса.
- Система логического управления — программа, обеспечивающая исполнение пользовательских программ (скриптов) логического управления в SCADA-системе. Набор редакторов для их разработки.
- База данных реального времени — программа, обеспечивающая сохранение истории процесса в режиме реального времени.
- Система управления тревогами — программа, обеспечивающая автоматический контроль технологических событий, отнесение их к категории нормальных, предупреждающих или аварийных, а также обработку событий оператором или компьютером.
- Генератор отчетов — программа, обеспечивающая создание пользовательских отчетов о технологических событиях. Набор редакторов для их разработки.
- Внешние интерфейсы — стандартные интерфейсы обмена данными между SCADA и другими приложениями. Обычно OPC, DDE, ODBC, DLL и т. д.
Концепции систем
Термин SCADA обычно относится к централизованным системам контроля и управления всей системой, или комплексами систем, осуществляемого с участием человека. Большинство управляющих воздействий выполняется автоматически RTU или ПЛК. Непосредственное управление процессом обычно обеспечивается RTU или PLC, а SCADA управляет режимами работы. Например, PLC может управлять потоком охлаждающей воды внутри части производственного процесса, а SCADA система может позволить операторам изменять уста для потока, менять маршруты движения жидкости, заполнять те или иные ёмкости, а также следить за тревожными сообщениями (алармами), такими как — потеря потока и высокая температура, которые должны быть отображены, записаны, и на которые оператор должен своевременно реагировать. Цикл управления с обратной связью проходит через RTU или ПЛК, в то время как SCADA система контролирует полное выполнение цикла.
Сбор данных начинается в RTU или на уровне PLC и включает — показания измерительного прибора. Далее данные собираются и форматируются таким способом, чтобы оператор диспетчерской, используя HMI мог принять контролирующие решения — корректировать или прервать стандартное управление средствами RTU/ПЛК. Данные могут также быть записаны в архив для построения трендов и другой аналитической обработки накопленных данных.[ http://ru.wikipedia.org/wiki/SCADA]
CitectSCADA
полнофункциональная система мониторинга, управления и сбора данных (SCADA – Supervisory Control And Data Acquisition)
ТЕХНИЧЕСКАЯ ИНФОРМАЦИЯ:CitectSCADA построена на базе мультизадачного ядра реального времени, что обеспечивает производительность сбора до 5 000 значений в секунду при работе в сетевом режиме с несколькими станциями. Модульная клиент-серверная архитектура позволяет одинаково эффективно применять CitectSCADA как в малых проектах, с использованием только одного АРМ, так и в больших, с распределением задач на несколько компьютеров.
В отличие от других SCADA-систем среда разработки CitectSCADA поставляется бесплатно. Оплачивается только среда исполнения (runtime). Это позволяет пользователю разработать и протестировать пробный проект, не вкладывая средств на начальном этапе.
Схема лицензирования CitectSCADA основана на учете числа одновременно задействованных компьютеров в проекте, а не общего числа компьютеров, на которых установлена CitectSCADA.
CitectSCADA лицензируется на заданное количество точек (дискретных или аналоговых переменных). При этом учитываются только внешние переменные, считываемые из устройств ввода/вывода, а внутренние переменные, находящиеся в памяти или на диске, бесплатны и не входят в количество лицензируемых точек. Градация количества лицензируемых точек в CitectSCADA более равномерна, чем в других системах: 75, 150, 500, 1 500, 5 000, 15 000, 50 000 и неограниченное количество.
В CitectSCADA резервирование является встроенным и легко конфигурируемым. Резервирование позволяет защищать все зоны потенциальных отказов как функциональных модулей (серверов и клиентов), так и сетевых соединений между узлами и устройствами ввода/вывода.
CitectSCADA имеет встроенный язык программирования CiCode, а также поддержку VBA.
CitectSCADA работает как 32-разрядное приложение Windows 9X/NT/2000/XP/2003. Сбор данных, формирование алармов и построение трендов происходит одновременно с редактированием и компиляцией.
[ http://www.rtsoft.ru/catalog/soft/scada/detail/343/]
Словесный портрет современной управляющей системы типа SCADA
-
Масштабируемая
- Наращивание системы без её переконфигурирования
- Масштабы проекта не ограничены
- До 255 одновременно подключённых клиентов
- Поддержка локальных и глобальных сетей
- Возможность интеграции с веб-приложениями без конфигурирования системы
- Возможность функционирования при малой пропускной способности коммуникаций
- Поддержка кластерных конфигураций
- Возможность перезапуска отдельных процессов, относящихся к разным компонентам
-
Гибкая
- Полноценная архитектура «клиент-сервер»
- Возможность масштабирования серверов/серверных массивов алармов, трендов и отчётов
- Поддержка централизованного хранения файлов проекта для удобства обслуживания, а также распределённого хранения и комбинированного варианта
- Внесение изменений на отдельных локациях
- Возможность функционирования при малой пропускной способности коммуникаций
- Поддержка устоявшихся и новых стандартов
-
Надёжная
- Встроенная поддержка режима ожидания
- Резервирование файловых серверов
- Резервирование сетевых коммуникаций
- Резервирование серверов алармов
- Резервирование серверов трендов
- Резервирование серверов отчётов
- Многоуровневое резервирование ввода-вывода
- Автоматическая замена серверов
- Автоматическая синхронизация историй трендов
- Автоматическая синхронизация таблиц алармов
- Автоматическая синхронизация времени
- Защитные функции
- Автоматический перезапуск в случае сбоя системы
- Высокопроизводительная
- Безопасная
-
Коммуникационные технологии
- Поддержка открытых коммуникационных стандартов
- Поддержка каждым сервером ввода-вывода многих протоколов
- Драйверы протоколов RS-232, RS-422, RS-485, TCP/IP
- Время установки драйверов в пределах 60 секунд
- До 255 одновременно подключённых клиентов
- До 4096 устройств ввода-вывода на одну систему
- Поддержка внешнего подключения для удалённых устройств
- Средства разработки драйверов для специализированных протоколов
- Поддержка стандарта OPC Server DA2.0
- Интегрированный веб-сервис XML
- Доступ
- Неограниченное число меток
- Длина имени метки до 80 символов
- Поддержка меток качества и времени для соответствующих драйверов
- Единая база данных для контроллеров ПЛК и системы SCADA
- Двунаправленная синхронизация со средой разработки для ПЛК
- Статическая синхронизация для разработки в автономном режиме
- - Автоматические импорт и синхронизация
- Импорт из ПЛК разных типов
- Добавление пользовательских схем импорта
-
Разработка
- Неограниченное число экранов
- 24-битные цвета
- Быстрый выбор цветов по названиям
- Поддержка прозрачных цветов
- Продвинутая анимация без дополнительного программирования
- Анимация символов на базе тегов
- До 32000 анимированных изображений на страницу
- Неограниченное число мигающих цветов
- Мультиязычность
- Инструменты типа 3D Pipe
- Трёхмерные эффекты (поднятие, опускание, выдавливание)
-
Импорт графики
- Растровые изображения Windows (BMP, RLE, DIB)
- Формат AutoCAD (DXF)
- Формат Encapsulated Postscript (EPS)
- Формат Fax Image (FAX)
- Формат Ventura (IMG)
- Формат JPEG (JPG, JIF, JFF, JFE)
- Формат Photo CD (PCD)
- Формат PaintBrush (PCX)
- Формат Portable Network Graphics (PNG)
- Формат Targa (TGA)
- Формат Tagged Image Format (TIFF)
- Формат Windows Meta File (WMF)
- Формат Word Perfect Graphics (WPG)
- Неограниченное число отмен действий
- Кнопки в стиле Windows XP со свойствами динамического перемещения
- Шаблоны
- Символы
- Более 800 символов в комплекте поставки
-
Объектное конфигурирование
- Неограниченное число объектов типа «джинн» (Genie) и «суперджинн» (Super Genie)
- Пользовательские «джинны» позволяют отображать на экране пользовательское оборудование
- Пользовательские «суперджины» позволяют работать с разными устройствами через один интерфейс
- Объекты типа «джинн» и «суперджинн» способны воспринимать изменения в тегах устройств без дополнительного программирования
-
Работа
- Разрешения до 4096 x 4096
- Изменение размеров изображений (изотропное и анизотропное)
- Поддержка вывода на несколько мониторов
- Настройка скорости обновления страниц (минимум 10 мс)
- Информирование о потере связи
- Переключение языков в ходе работы
- Поддержка одно- и двухбайтовых наборов символов
-
Безопасность
- Уровень безопасности влияет на:
- Видимость объектов
- Доступ к графическим дисплеям
- Подтверждение алармов
- Создание отчётов
- Системные утилиты
-
Управление
- Сенсорные команды
- Мышь
- -Клавиатурное управление системой, страницами и анимацией
- Вертикальные и горизонтальные ползунки
- Замена БД
-
Анализ процессов
- Объединение алармов с трендами
- 32 и более перьев
- 4 и более оконных секций
- 2 и более курсоров
- Наложение перьев
- Информация о качестве данных
- Аналоговые и цифровые перья
- Информация о подтверждении алармов
- Описание алармов (аналоговых и мультицифровых)
- Комментарии к алармам
- Поддержка перехода на летнее и зимнее время
- Сохранение просмотров в процессе работы
- Хранение просмотров в удалённых локациях
- Отображение различных временных периодов на том же дисплее
- Настраиваемое и расширяемое управление
-
Алармы
- Неограниченное число алармов
- Централизованная обработка алармов
- Алармы могут быть следующих типов:
- Цифровые
- Аналоговые
- Временные метки
- Высокоуровневые выражения
- Мультицифровые
- Цифровые с временными метками
- Аналоговые с временными метками
- Изменение языка для всех алармов в процессе работы
- Подтверждение приёма в сети без дополнительного конфигурирования
- Отключение сети без дополнительного конфигурирования
- Категории, зоны и приоритеты алармов
- Задержки алармов
- Назначение временных меток с разрешением в 1 мс
- Различные данные в алармах
- Индивидуальные и групповые подтверждения
- Подтверждения на основе категорий и приоритетов
- Подтверждения отображаются графически, в списке алармов или через специализированный код:
- Сортировка алармов
- Фильтрация алармов
- Пользовательские поля алармов
-
Тренды
- Неограниченное число трендов
- До 16000 трендов на страницу
- Отображение любого тренда из истории менее чем за 1 секунду
- Файлов трендов регулируемых размеров
- Просмотр архивных трендов параллельно с актуальными в процессе работы системы
- Выбор с разрешением 1 мс
- Сравнение трендов
- Быстрый выбор трендов по тегам
- Сохранение по событию или периодическое сохранение
Статистический контроль ( SPC)
- Таблицы индексов Cp и CpK
- Контрольные карты X, R и S
- Диаграммы Парето
- Настраиваемые размеры и границы подгрупп
- Типы алармов: Above UCL, Below LCL, Outside CL, Down Trend, Up Trend, Erratic, Gradual, Down, Gradual Up, Mixture, Outside WL, Freak, Stratification и высокоуровневые выражения
- Редактор сгенерированных отчётов, редактирование по модели WYSIWYN, отчёты в формате Rich Text
- Запуск внешними событиями, по расписанию, через высокоуровневые выражения и по команде оператора
- Вывод на принтер, в файл, по электронной почте, на экран, в формат HTML
- Разработка проекта
- Масштабы проекта не ограничены
- Возможность разбиения на несколько проектов
- Удобная стандартизация проектов
- Удобное обслуживание проектов
- Встроенное средство настройки компьютеров позволяет конфигурировать каждый подключённый к сети ПК по отдельности
- Истинная вытесняющая многозадачность
- До 512 параллельных потоков
- Доступно более 600 функций SCADA
- Библиотеки для пользовательских функций
- До 2700 пользовательских функций
- Локальные, модульные и глобальные переменные
- Дополнительное программное обеспечение для создания собственных функций не требуется
- Прямой доступ к данным трендов, отчётов и алармов
- Подсвечивание синтаксиса
- Система онлайн-подсказок
- Всплывающие подсказки
- При редактировании доступны:
- Контрольные точки
- Просмотр переменных
- Мониторинг нитей
- Выделение кода цветом
- Окно контрольных точек
- Пошаговый режим выполнения
- Выделение текущей строки
- Удалённая отладка
- Автоматическая отладка в случае ошибок
- Сервер и клиент OPC
- Интерфейс ODBC
- Интерфейс OLE-DB
- Интерфейс CTAPI
- Интерфейс DLL
- Интерфейс MAPI (MAIL)
- Протоколы TCP/IP
- Последовательный интерфейс
[ http://www.rtsoft-training.ru/?p=600074]
Тематики
Синонимы
- SCADA-система
- диспетчерское управление и сбор данных
- система диспетчерского управления и сбора данных
- система мониторинга, управления и сбора данных
EN
Русско-английский словарь нормативно-технической терминологии > SCADA
6 активная передача данных
активная передача данных
—
[Интент]Революционной разработкой MOXA можно назвать внедрение в модулях ioLogik системы активной передачи данных, реализованной технологией Active IO. Применяя эту технологию в системах телеметрии, пользователь может отказаться от классической технологии опроса модулей ввода/вывода со стороны операторских АРМ и переложить задачу оповещения об изменении состояния контролируемых параметров на сами модули ioLogik.
Такой подход имеет ряд неоспоримых преимуществ.
Во-первых, оператор узнает о произошедших событиях мгновенно от самого модуля сбора данных, не дожидаясь очередного цикла опроса исполнительных устройств со стороны сервера.
Во-вторых, с центрального сервера сбора данных снимается ресурсоемкая задача постоянного опроса устройств сбора данных.
В-третьих, что немаловажно для больших распределенных систем управления, отказ от постоянного опроса периферийных модулей радикально снижает нагрузку на сеть передачи данных.
Большое значение имеет возможность расширения системы управления в процессе эксплуатации.
Так, если в традиционной архитектуре пассивного опроса увеличение количества контролируемых точек неминуемо ведет к задержкам и увеличению времени реакции, то принцип активной передачи данных позволяет избежать этой проблемы, передавая данные лишь в момент изменения состояния канала.
[Журнал “ИСУП” № 2(26)_2010]Тематики
EN
Русско-английский словарь нормативно-технической терминологии > активная передача данных
7 проект
проект
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]
проект
1. См. Типы предприятий. 2. Деятельность, мероприятие, предполагающие осуществление комплекса каких-то действий, обеспечивающих достижение определенных целей. 3. Инвестиционный проект — система организационно-правовых и расчетных документов, необходимых для осуществления заданной цели с помощью инвестиций (например, строительства предприятий). См. Эффективность инвестиционного проекта.
[ http://slovar-lopatnikov.ru/]Тематики
- экономика
- электротехника, основные понятия
EN
4.29 проект (project): Попытка действий с определенными начальными и конечными сроками, предпринимаемая для создания продукта или услуги в соответствии с заданными ресурсами и требованиями.
Примечание 1 - Адаптировано из ИСО 9000:2005.
Примечание 2 - Проект может рассматриваться как уникальный процесс, включающий в себя скоординированные и управляемые виды деятельности, а также может быть комбинацией видов деятельности из процессов проекта и технических процессов, определенных в настоящем стандарте.
Источник: ГОСТ Р ИСО/МЭК 12207-2010: Информационная технология. Системная и программная инженерия. Процессы жизненного цикла программных средств оригинал документа
4.12 проект (project): Попытка действий с определенными начальной и конечной датами, предпринимаемая для создания продукта или услуги в соответствии с заданными ресурсами и требованиями.
Примечания
1 Адаптация определения, приведенного в [3] и [20].
2 Проект может рассматриваться как уникальный процесс, включающий в себя координируемые и контролируемые действия, и может быть комбинацией действий из процессов проекта и технических процессов, определенных в настоящем стандарте.
Источник: ГОСТ Р ИСО/МЭК 15288-2005: Информационная технология. Системная инженерия. Процессы жизненного цикла систем оригинал документа
3.5 проект (project): Уникальный процесс, состоящий из совокупности скоординированной и управляемой деятельности с начальной и конечной датами, предпринятый для достижения цели, соответствующей конкретным требованиям, включая ограничения сроков, стоимости и ресурсов (ИСО 9000, пункт 3.4 3, кроме примечаний).
Примечания
1 Отдельный проект может являться частью более крупного проекта.
2 В некоторых проектах цели и область применения совершенствуют, а характеристики продукции определяют по мере разработки проекта.
3 Продукт проекта определяют в общем случае в области применения проекта (см. 7.3.1). Это могут быть один или несколько модулей изделия. Продукт проекта может быть материальным или нематериальным.
4 Проектная организация обычно является временной - создаваемой на время выполнения проекта.
5 Сложность взаимодействий между различными видами проектной деятельности не обязательно связана с размером проекта.
Источник: ГОСТ Р ИСО 10006-2005: Системы менеджмента качества. Руководство по менеджменту качества при проектировании оригинал документа
3.2 проект (project): Уникальный процесс, состоящий из набора скоординированных и управляемых действий с указанием дат начала и окончания, предпринятых для достижения соответствия определенным требованиям, включая ограничения по времени, стоимости и ресурсам.
Примечание 1 - Конкретный проект может быть частью более крупного проекта.
Примечание 2 - В некоторых проектах по мере их развития совершенствуются цели проекта и характеристики продукции.
Источник: ГОСТ Р 51901.4-2005: Менеджмент риска. Руководство по применению при проектировании оригинал документа
3.4.3 проект (project): Уникальный процесс (3.4.1), состоящий из совокупности скоординированных и управляемых видов деятельности с начальной и конечной датами, предпринятый для достижения цели, соответствующей конкретным требованиям (3.1.2), включающий ограничения по срокам, стоимости и ресурсам.
Примечания
1 Отдельный проект может быть частью структуры более крупного проекта.
2 В некоторых проектах цели совершенствуются, а характеристики (3.5.1) продукции определяются соответственно по мере развития проекта.
3 Выходом проекта может быть одно изделие или несколько единиц продукции (3.4.2).
4 Адаптировано из ИСО 10006:2003.
Источник: ГОСТ Р ИСО 9000-2008: Системы менеджмента качества. Основные положения и словарь оригинал документа
3.5 проект (project): Уникальный процесс (см. 3.3), состоящий из совокупности скоординированной и управляемой деятельности с начальной и конечной датами, предпринятый для достижения цели, соответствующей конкретным требованиям, включающий ограничения сроков, стоимости и ресурсов.
Примечания
1 Отдельный проект может быть частью более крупного проекта.
2 В некоторых проектах цели совершенствуются, а характеристики продукции определяются по мере развития проекта.
3 Выходом проекта может быть одно изделие или несколько единиц продукции (3.4).
[см. 3.4.3 ИСО 9000]
Источник: ГОСТ Р ИСО 10005-2007: Менеджмент организации. Руководящие указания по планированию качества оригинал документа
3.4.3 проект (en project; fr projet): Уникальный процесс (3.4.1), состоящий из совокупности скоординированной и управляемой деятельности с начальной и конечной датами, предпринятый для достижения цели, соответствующей конкретным требованиям (3.1.2), включающий ограничения сроков, стоимости и ресурсов.
Примечания
1 Отдельный проект может быть частью структуры более крупного проекта.
2 В некоторых проектах цели совершенствуются, а характеристики (3.5.1) продукции определяются соответственно по мере развития проекта.
3 Выходом проекта может быть одно изделие или несколько единиц продукции (3.4.2).
4 Адаптировано из ИСО 10006.
Источник: ГОСТ Р ИСО 9000-2001: Системы менеджмента качества. Основные положения и словарь оригинал документа
3.4.3 проект (project): Уникальный процесс (3.4.1), состоящий из совокупности скоординированных и управляемых видов деятельности с начальной и конечной датами, предпринятый для достижения цели, соответствующей конкретным требованиям (3.1.2), включающий ограничения по срокам, стоимости и ресурсам.
Примечания
1 Отдельный проект может быть частью структуры более крупного проекта.
2 В некоторых проектах цели совершенствуются, а характеристики (3.5.1) продукции определяются соответственно по мере развития проекта.
3 Выходом проекта может быть одно изделие или несколько единиц продукции (3.4.2).
4 Адаптировано из ISO 10006:2003.
Источник: ГОСТ ISO 9000-2011: Системы менеджмента качества. Основные положения и словарь
3.7.54 проект (project): Уникальный процесс, состоящий из совокупности скоординированной и управляемой деятельности с начальной и конечной датами, предпринятый для достижения цели, соответствующей конкретным требованиям, включая ограничения сроков, стоимости и ресурсов.
Примечание 1 - Отдельный проект может являться частью более крупного проекта.
Примечание 2 - В некоторых проектах цели и область применения совершенствуют, а характеристики продукции определяют по мере разработки проекта.
Примечание 3 - Продукт проекта определяют в общем случае в области применения проекта. Это могут быть один или несколько модулей изделия. Продукт проекта может быть материальным или нематериальным.
Примечание 4 - Проектная организация обычно является временной - создаваемой на время выполнения проекта.
Примечание 5 - Сложность взаимодействий между различными видами проектной деятельности не обязательно связана с размером проекта.
Источник: ГОСТ Р 54147-2010: Стратегический и инновационный менеджмент. Термины и определения оригинал документа
Русско-английский словарь нормативно-технической терминологии > проект
8 распределенный интеллект
Распределенный интеллектПонятие включает следующие основные аспекты.1) Единую графическую платформу для программирования таких устройств, как настольные компьютеры, системы реального времени, встроенные микропроцессоры и сигнальные процессоры. Программирование перечисленных устройств обеспечивается с помощью соответствующих обновленных модулей.2) Инструмент для обзора системы и обеспечения доступа ко всем ее узлам; позволяет из одного окна проекта просматривать, редактировать, запускать и отлаживать код, работающий на любом целевом блоке. 3) Упрощенный программный интерфейс для совместного использования. С помощью общей переменной можно передавать данные между системами, в том числе и системами реального времени, без потери скорости. Для осуществления передачи необходимо лишь сконфигурировать общую переменную с помощью несложных диалоговых окон. 4) Способность синхронизации внутри и между распределенными устройствами и системами. Измерение времени и синхронизация остаются ключевыми проблемами при построении эффективных измерительных и управляющих систем.Russian-English dictionary of Nanotechnology > распределенный интеллект
9 distributed intelligence
Распределенный интеллектПонятие включает следующие основные аспекты.1) Единую графическую платформу для программирования таких устройств, как настольные компьютеры, системы реального времени, встроенные микропроцессоры и сигнальные процессоры. Программирование перечисленных устройств обеспечивается с помощью соответствующих обновленных модулей.2) Инструмент для обзора системы и обеспечения доступа ко всем ее узлам; позволяет из одного окна проекта просматривать, редактировать, запускать и отлаживать код, работающий на любом целевом блоке. 3) Упрощенный программный интерфейс для совместного использования. С помощью общей переменной можно передавать данные между системами, в том числе и системами реального времени, без потери скорости. Для осуществления передачи необходимо лишь сконфигурировать общую переменную с помощью несложных диалоговых окон. 4) Способность синхронизации внутри и между распределенными устройствами и системами. Измерение времени и синхронизация остаются ключевыми проблемами при построении эффективных измерительных и управляющих систем.Russian-English dictionary of Nanotechnology > distributed intelligence
10 дистанционное техническое обслуживание
дистанционное техническое обслуживание
Техническое обслуживание объекта, проводимое под управлением персонала без его непосредственного присутствия.
[ОСТ 45.152-99 ]Параллельные тексты EN-RU из ABB Review. Перевод компании Интент
Service from afarДистанционный сервисABB’s Remote Service concept is revolutionizing the robotics industryРазработанная АББ концепция дистанционного обслуживания Remote Service революционизирует робототехникуABB robots are found in industrial applications everywhere – lifting, packing, grinding and welding, to name a few. Robust and tireless, they work around the clock and are critical to a company’s productivity. Thus, keeping these robots in top shape is essential – any failure can lead to serious output consequences. But what happens when a robot malfunctions?Роботы АББ используются во всех отраслях промышленности для перемещения грузов, упаковки, шлифовки, сварки – всего и не перечислить. Надежные и неутомимые работники, способные трудиться день и ночь, они представляют большую ценность для владельца. Поэтому очень важно поддерживать их в надлежащей состоянии, ведь любой отказ может иметь серьезные последствия. Но что делать, если робот все-таки сломался?ABB’s new Remote Service concept holds the answer: This approach enables a malfunctioning robot to alarm for help itself. An ABB service engineer then receives whole diagnostic information via wireless technology, analyzes the data on a Web site and responds with support in just minutes. This unique service is paying off for customers and ABB alike, and in the process is revolutionizing service thinking.Ответом на этот вопрос стала новая концепция Remote Service от АББ, согласно которой неисправный робот сам просит о помощи. C помощью беспроводной технологии специалист сервисной службы АББ получает всю необходимую диагностическую информацию, анализирует данные на web-сайте и через считанные минуты выдает рекомендации по устранению отказа. Эта уникальная возможность одинаково ценна как для заказчиков, так и для самой компании АББ. В перспективе она способна в корне изменить весь подход к организации технического обслуживания.Every minute of production downtime can have financially disastrous consequences for a company. Traditional reactive service is no longer sufficient since on-site service engineer visits also demand great amounts of time and money. Thus, companies not only require faster help from the service organization when needed but they also want to avoid disturbances in production.Каждая минута простоя производства может привести к губительным финансовым последствиям. Традиционная организация сервиса, предусматривающая ликвидацию возникающих неисправностей, становится все менее эффективной, поскольку вызов сервисного инженера на место эксплуатации робота сопряжен с большими затратами времени и денег. Предприятия требуют от сервисной организации не только более быстрого оказания помощи, но и предотвращения возможных сбоев производства.In 2006, ABB developed a new approach to better meet customer’s expectations: Using the latest technologies to reach the robots at customer sites around the world, ABB could support them remotely in just minutes, thereby reducing the need for site visits. Thus the new Remote Service concept was quickly brought to fruition and was launched in mid-2007. Statistics show that by using the system the majority of production stoppages can be avoided.В 2006 г. компания АББ разработала новый подход к удовлетворению ожиданий своих заказчиков. Использование современных технологий позволяет специалистам АББ получать информацию от роботов из любой точки мира и в считанные минуты оказывать помощь дистанционно, в результате чего сокращается количество выездов на место установки. Запущенная в середине 2007 г. концепция Remote Service быстро себя оправдала. Статистика показывает, что её применение позволило предотвратить большое число остановок производства.Reactive maintenance The hardware that makes ABB Remote Service possible consists of a communication unit, which has a function similar to that of an airplane’s so-called black box 1. This “service box” is connected to the robot’s control system and can read and transmit diagnostic information. The unit not only reads critical diagnostic information that enables immediate support in the event of a failure, but also makes it possible to monitor and analyze the robot’s condition, thereby proactively detecting the need for maintenance.Устранение возникающих неисправностей Аппаратное устройство, с помощью которого реализуется концепция Remote Service, представляет собой коммуникационный блок, работающий аналогично черному ящику самолета (рис. 1). Этот блок считывает диагностические данные из контроллера робота и передает их по каналу GSM. Считывается не только информация, необходимая для оказания немедленной помощи в случае отказа, но и сведения, позволяющие контролировать и анализировать состояние робота для прогнозирования неисправностей и планирования технического обслуживания.If the robot breaks down, the service box immediately stores the status of the robot, its historical data (as log files), and diagnostic parameters such as temperature and power supply. Equipped with a built-in modem and using the GSM network, the box transmits the data to a central server for analysis and presentation on a dedicated Web site. Alerts are automatically sent to the nearest of ABB’s 1,200 robot service engineers who then accesses the detailed data and error log to analyze the problem.При поломке робота сервисный блок немедленно сохраняет данные о его состоянии, сведения из рабочего журнала, а также значения диагностических параметров (температура и характеристики питания). Эти данные передаются встроенным GSM-модемом на центральный сервер для анализа и представления на соответствующем web-сайте. Аварийные сообщения автоматически пересылаются ближайшему к месту аварии одному из 1200 сервисных инженеров-робототехников АББ, который получает доступ к детальной информации и журналу аварий для анализа возникшей проблемы.A remotely based ABB engineer can then quickly identify the exact fault, offering rapid customer support. For problems that cannot be solved remotely, the service engineer can arrange for quick delivery of spare parts and visit the site to repair the robot. Even if the engineer must make a site visit, service is faster, more efficient and performed to a higher standard than otherwise possible.Специалист АББ может дистанционно идентифицировать отказ и оказать быструю помощь заказчику. Если неисправность не может быть устранена дистанционно, сервисный инженер организовывает доставку запасных частей и выезд ремонтной бригады. Даже если необходимо разрешение проблемы на месте, предшествующая дистанционная диагностика позволяет минимизировать объем работ и сократить время простоя.Remote Service enables engineers to “talk” to robots remotely and to utilize tools that enable smart, fast and automatic analysis. The system is based on a machine-to-machine (M2M) concept, which works automatically, requiring human input only for analysis and personalized customer recommendations. ABB was recognized for this innovative solution at the M2M United Conference in Chicago in 2008 Factbox.Remote Service позволяет инженерам «разговаривать» с роботами на расстоянии и предоставляет в их распоряжение интеллектуальные средства быстрого автоматизированного анализа. Система основана на основе технологии автоматической связи машины с машиной (M2M), где участие человека сводится к анализу данных и выдаче рекомендаций клиенту. В 2008 г. это инновационное решение от АББ получило приз на конференции M2M United Conference в Чикаго (см. вставку).Proactive maintenanceRemote Service also allows ABB engineers to monitor and detect potential problems in the robot system and opens up new possibilities for proactive maintenance.Прогнозирование неисправностейRemote Service позволяет инженерам АББ дистанционно контролировать состояние роботов и прогнозировать возможные неисправности, что открывает новые возможности по организации профилактического обслуживания.The service box regularly takes condition measurements. By monitoring key parameters over time, Remote Service can identify potential failures and when necessary notify both the end customer and the appropriate ABB engineer. The management and storage of full system backups is a very powerful service to help recover from critical situations caused, for example, by operator errors.Сервисный блок регулярно выполняет диагностические измерения. Непрерывно контролируя ключевые параметры, Remote Service может распознать потенциальные опасности и, при необходимости, оповещать владельца оборудования и соответствующего специалиста АББ. Резервирование данных для возможного отката является мощным средством, обеспечивающим восстановление системы в критических ситуациях, например, после ошибки оператора.The first Remote Service installation took place in the automotive industry in the United States and quickly proved its value. The motherboard in a robot cabinet overheated and the rise in temperature triggered an alarm via Remote Service. Because of the alarm, engineers were able to replace a faulty fan, preventing a costly production shutdown.Первая система Remote Service была установлена на автозаводе в США и очень скоро была оценена по достоинству. Она обнаружила перегрев материнской платы в шкафу управления роботом и передала сигнал о превышении допустимой температуры, благодаря чему инженеры смогли заменить неисправный вентилятор и предотвратить дорогостоящую остановку производства.MyRobot: 24-hour remote access
Having regular access to a robot’s condition data is also essential to achieving lean production. At any time, from any location, customers can verify their robots’ status and access maintenance information and performance reports simply by logging in to ABB’s MyRobot Web site. The service enables customers to easily compare performances, identify bottlenecks or developing issues, and initiate the mostСайт MyRobot: круглосуточный дистанционный доступДля того чтобы обеспечить бесперебойное производство, необходимо иметь регулярный доступ к информации о состоянии робота. Зайдя на соответствующую страницу сайта MyRobot компании АББ, заказчики получат все необходимые данные, включая сведения о техническом обслуживании и отчеты о производительности своего робота. Эта услуга позволяет легко сравнивать данные о производительности, обнаруживать возможные проблемы, а также оптимизировать планирование технического обслуживания и модернизации. С помощью MyRobot можно значительно увеличить выпуск продукции и уменьшить количество выбросов.Award-winning solutionIn June 2008, the innovative Remote Service solution won the Gold Value Chain award at the M2M United Conference in Chicago. The value chain award honors successful corporate adopters of M2M (machine–to-machine) technology and highlights the process of combining multiple technologies to deliver high-quality services to customers. ABB won in the categoryof Smart Services.Приз за удачное решениеВ июне 2008 г. инновационное решение Remote Service получило награду Gold Value Chain (Золотая цепь) на конференции M2M United Conference в Чикаго. «Золотая цепь» присуждается за успешное масштабное внедрение технологии M2M (машина – машина), а также за достижения в объединении различных технологий для предоставления высококачественных услуг заказчикам. АББ одержала победу в номинации «Интеллектуальный сервис».Case study: Tetley Tetley GB Ltd is the world’s second-largest manufacturer and distributor of tea. The company’s manufacturing and distribution business is spread across 40 countries and sells over 60 branded tea bags. Tetley’s UK tea production facility in Eaglescliffe, County Durham is the sole producer of Tetley tea bags 2.Пример применения: Tetley Компания TetleyGB Ltd является вторым по величине мировым производителем и поставщиком чая. Производственные и торговые филиалы компании имеются в 40 странах, а продукция распространяется под 60 торговыми марками. Чаеразвесочная фабрика в Иглсклифф, графство Дарем, Великобритания – единственный производитель чая Tetley в пакетиках (рис. 2).ABB offers a flexible choice of service agreements for both new and existing robot installations, which can help extend the mean time between failures, shorten the time to repair and lower the cost of automated production.Предлагаемые АББ контракты на выполнение технического обслуживания как уже имеющихся, так и вновь устанавливаемых роботов, позволяют значительно увеличить среднюю наработку на отказ, сократить время ремонта и общую стоимость автоматизированного производства.Robots in the plant’s production line were tripping alarms and delaying the whole production cycle. The spurious alarms resulted in much unnecessary downtime that was spent resetting the robots in the hope that another breakdown could be avoided. Each time an alarm was tripped, several hours of production time was lost. “It was for this reason that we were keen to try out ABB’s Remote Service agreement,” said Colin Trevor, plant maintenance manager.Установленные в технологической линии роботы выдавали аварийные сигналы, задерживающие выполнение производственного цикла. Ложные срабатывания вынуждали перезапускать роботов в надежде предотвратить возможные отказы, в результате чего после каждого аварийного сигнала производство останавливалось на несколько часов. «Именно поэтому мы решили попробовать заключить с АББ контракт на дистанционное техническое обслуживание», – сказал Колин Тревор, начальник технической службы фабрики.To prevent future disruptions caused by unplanned downtime, Tetley signed an ABB Response Package service agreement, which included installing a service box and system infrastructure into the robot control systems. Using the Remote Service solution, ABB remotely monitors and collects data on the “wear and tear” and productivity of the robotic cells; this data is then shared with the customer and contributes to smooth-running production cycles.Для предотвращения ущерба в результате незапланированных простоев Tetley заключила с АББ контракт на комплексное обслуживание Response Package, согласно которому системы управления роботами были дооборудованы сервисными блоками с необходимой инфраструктурой. С помощью Remote Service компания АББ дистанционно собирает данные о наработке, износе и производительности роботизированных модулей. Эти данные предоставляются заказчику для оптимизации загрузки производственного оборудования.Higher production uptimeSince the implementation of Remote Service, Tetley has enjoyed greatly reduced robot downtime, with no further disruptions caused by unforeseen problems. “The Remote Service package has dramatically changed the plant,” said Trevor. “We no longer have breakdown issues throughout the shift, helping us to achieve much longer periods of robot uptime. As we have learned, world-class manufacturing facilities need world-class support packages. Remote monitoring of our robots helps us to maintain machine uptime, prevent costly downtime and ensures my employees can be put to more valuable use.”Увеличение полезного времениС момента внедрения Remote Service компания Tetley была приятно удивлена резким сокращением простоя роботов и отсутствием незапланированных остановок производства. «Пакет Remote Service резко изменил ситуацию на предприятии», – сказал Тревор. «Мы избавились от простоев роботов и смогли резко увеличить их эксплуатационную готовность. Мы поняли, что для производственного оборудования мирового класса необходим сервисный пакет мирового класса. Дистанционный контроль роботов помогает нам поддерживать их в рабочем состоянии, предотвращать дорогостоящие простои и задействовать наш персонал для выполнения более важных задач».Service accessRemote Service is available worldwide, connecting more than 500 robots. Companies that have up to 30 robots are often good candidates for the Remote Service offering, as they usually have neither the engineers nor the requisite skills to deal with robotics faults themselves. Larger companies are also enthusiastic about Remote Service, as the proactive services will improve the lifetime of their equipment and increase overall production uptime.Доступность сервисаСеть Remote Service охватывает более 700 роботов по всему миру. Потенциальными заказчиками Remote Service являются компании, имеющие до 30 роботов, но не имеющие инженеров и техников, способных самостоятельно устранять их неисправности. Интерес к Remote Service проявляют и более крупные компании, поскольку они заинтересованы в увеличении срока службы и эксплуатационной готовности производственного оборудования.In today’s competitive environment, business profitability often relies on demanding production schedules that do not always leave time for exhaustive or repeated equipment health checks. ABB’s Remote Service agreements are designed to monitor its customers’ robots to identify when problems are likely to occur and ensure that help is dispatched before the problem can escalate. In over 60 percent of ABB’s service calls, its robots can be brought back online remotely, without further intervention.В условиях современной конкуренции окупаемость бизнеса часто зависит от соблюдения жестких графиков производства, не оставляющих времени для полномасштабных или периодических проверок исправности оборудования. Контракт Remote Service предусматривает мониторинг состояния роботов заказчика для прогнозирования возможных неисправностей и принятие мер по их предотвращению. В более чем 60 % случаев для устранения неисправности достаточно дистанционной консультации в сервисной службе АББ, дальнейшего вмешательства не требуется.ABB offers a flexible choice of service agreements for both new and existing robot installations, which helps extend the mean time between failures, shorten the time to repair and lower the total cost of ownership. With four new packages available – Support, Response, Maintenance and Warranty, each backed up by ABB’s Remote Service technology – businesses can minimize the impact of unplanned downtime and achieve improved production-line efficiency.Компания АББ предлагает гибкий выбор контрактов на выполнение технического обслуживания как уже имеющихся, так и вновь устанавливаемых роботов, которые позволяют значительно увеличить среднюю наработку на отказ, сократить время ремонта и эксплуатационные расходы. Четыре новых пакета на основе технологии Remote Service – Support, Response, Maintenance и Warranty – позволяют минимизировать внеплановые простои и значительно повысить эффективность производства.The benefits of Remote Sevice are clear: improved availability, fewer service visits, lower maintenance costs and maximized total cost of ownership. This unique service sets ABB apart from its competitors and is the beginning of a revolution in service thinking. It provides ABB with a great opportunity to improve customer access to its expertise and develop more advanced services worldwide.Преимущества дистанционного технического обслуживания очевидны: повышенная надежность, уменьшение выездов ремонтных бригад, уменьшение затрат на обслуживание и общих эксплуатационных расходов. Эта уникальная услуга дает компании АББ преимущества над конкурентами и демонстрирует революционный подход к организации сервиса. Благодаря ей компания АББ расширяет доступ заказчиков к опыту своих специалистов и получает возможность более эффективного оказания технической помощи по всему миру.Тематики
- тех. обсл. и ремонт средств электросвязи
Обобщающие термины
EN
Русско-английский словарь нормативно-технической терминологии > дистанционное техническое обслуживание
11 управление электропитанием
управление электропитанием
-
[Интент]
Управление электропитанием ЦОД
Автор: Жилкина Наталья
Опубликовано 23 апреля 2009 года
Источники бесперебойного питания, функционирующие в ЦОД, составляют важный элемент общей системы его энергообеспечения. Вписываясь в контур управления ЦОД, система мониторинга и управления ИБП становится ядром для реализации эксплуатационных функций.
Три задачи
Системы мониторинга, диагностики и управления питанием нагрузки решают три основные задачи: позволяют ИБП выполнять свои функции, оповещать персонал о происходящих с ними событиях и посылать команды для автоматического завершения работы защищаемого устройства.
Мониторинг параметров ИБП предполагает отображение и протоколирование состояния устройства и всех событий, связанных с его изменением. Диагностика реализуется функциями самотестирования системы. Управляющие же функции предполагают активное вмешательство в логику работы устройства.Многие специалисты этого рынка, отмечая важность процедуры мониторинга, считают, что управление должно быть сведено к минимуму. «Функция управления ИБП тоже нужна, но скорее факультативно, — говорит Сергей Ермаков, технический директор компании Inelt и эксперт в области систем Chloride. — Я глубоко убежден, что решения об активном управляющем вмешательстве в работу систем защиты электропитания ответственной нагрузки должен принимать человек, а не автоматизированная система. Завершение работы современных мощных серверов, на которых функционируют ответственные приложения, — это, как правило, весьма длительный процесс. ИБП зачастую не способны обеспечивать необходимое для него время, не говоря уж о времени запуска какого-то сервиса». Функция же мониторинга позволяет предотвратить наступление нежелательного события — либо, если таковое произошло, проанализировать его причины, опираясь не на слова, а на запротоколированные данные, хранящиеся в памяти адаптера или файлах на рабочей станции мониторинга.
Эту точку зрения поддерживает и Алексей Сарыгин, технический директор компании Radius Group: «Дистанционное управление мощных ИБП — это вопрос, к которому надо подходить чрезвычайно аккуратно. Если функции дистанционного мониторинга и диспетчеризации необходимы, то практика предоставления доступа персоналу к функциям дистанционного управления представляется радикально неверной. Доступность модулей управления извне потенциально несет в себе риск нарушения безопасности и категорически снижает надежность системы. Если существует физическая возможность дистанционно воздействовать на ИБП, на его параметры, отключение, снятие нагрузки, закрытие выходных тиристорных ключей или блокирование цепи байпаса, то это чревато потерей питания всего ЦОД».
Практически на всех трехфазных ИБП предусмотрена кнопка E.P.O. (Emergency Power Off), дублер которой может быть выведен на пульт управления диспетчерской. Она обеспечивает аварийное дистанционное отключение блоков ИБП при наступлении аварийных событий. Это, пожалуй, единственная возможность обесточить нагрузку, питаемую от трехфазного аппарата, но реализуется она в исключительных случаях.
Что же касается диагностики электропитания, то, как отмечает Юрий Копылов, технический директор московского офиса корпорации Eaton, в последнее время характерной тенденцией в управляющем программном обеспечении стал отказ от предоставления функций удаленного тестирования батарей даже системному администратору.
— Адекватно сравнивать состояние батарей необходимо под нагрузкой, — говорит он, — сам тест запускать не чаще чем раз в два дня, а разряжать батареи надо при одном и том же токе и уровне нагрузки. К тому же процесс заряда — довольно долгий. Все это не идет батареям на пользу.Средства мониторинга
Производители ИБП предоставляют, как правило, сразу несколько средств мониторинга и в некоторых случаях даже управления ИБП — все они основаны на трех основных методах.
В первом случае устройство подключается напрямую через интерфейс RS-232 (Com-порт) к консоли администратора. Дальность такого подключения не превышает 15 метров, но может быть увеличена с помощью конверторов RS-232/485 и RS-485/232 на концах провода, связывающего ИБП с консолью администратора. Такой способ обеспечивает низкую скорость обмена информацией и пригоден лишь для топологии «точка — точка».
Второй способ предполагает использование SNMP-адаптера — встроенной или внешней интерфейсной карты, позволяющей из любой точки локальной сети получить информацию об основных параметрах ИБП. В принципе, для доступа к ИБП через SNMP достаточно веб-браузера. Однако для большего комфорта производители оснащают свои системы более развитым графическим интерфейсом, обеспечивающим функции мониторинга и корректного завершения работы. На базе SNMP-протокола функционируют все основные системы мониторинга и управления ИБП, поставляемые штатно или опционально вместе с ИБП.
Стандартные SNMP-адаптеры поддерживают подключение нескольких аналоговых или пороговых устройств — датчик температуры, движения, открытия двери и проч. Интеграция таких устройств в общую систему мониторинга крупного объекта (например, дата-центра) позволяет охватить огромное количество точек наблюдения и отразить эту информацию на экране диспетчера.
Большое удобство предоставляет метод эксплуатационного удаленного контроля T.SERVICE, позволяющий отследить работу оборудования посредством телефонной линии (через модем GSM) или через Интернет (с помощью интерфейса Net Vision путем рассылки e-mail на электронный адрес потребителя). T.SERVICE обеспечивает диагностирование оборудования в режиме реального времени в течение 24 часов в сутки 365 дней в году. ИБП автоматически отправляет в центр технического обслуживания регулярные отчеты или отчеты при обнаружении неисправности. В зависимости от контролируемых параметров могут отправляться уведомления о неправильной эксплуатации (с пользователем связывается опытный специалист и рекомендует выполнить простые операции для предотвращения ухудшения рабочих характеристик оборудования) или о наличии отказа (пользователь информируется о состоянии устройства, а на место установки немедленно отправляется технический специалист).Профессиональное мнение
Наталья Маркина, коммерческий директор представительства компании SOCOMEC
Управляющее ПО фирмы SOCOMEC легко интегрируется в общий контур управления инженерной инфраструктурой ЦОД посредством разнообразных интерфейсов передачи данных ИБП. Установленное в аппаратной или ЦОД оборудование SOCOMEC может дистанционно обмениваться информацией о своих рабочих параметрах с системами централизованного управления и компьютерными сетями посредством сухих контактов, последовательных портов RS232, RS422, RS485, а также через интерфейс MODBUS TCP и GSS.
Интерфейс GSS предназначен для коммуникации с генераторными установками и включает в себя 4 входа (внешние контакты) и 1 выход (60 В). Это позволяет программировать особые процедуры управления, Global Supply System, которые обеспечивают полную совместимость ИБП с генераторными установками.
У компании Socomec имеется широкий выбор интерфейсов и коммуникационного программного обеспечения для установки диалога между ИБП и удаленными системами мониторинга промышленного и компьютерного оборудования. Такие опции связи, как панель дистанционного управления, интерфейс ADC (реконфигурируемые сухие контакты), обеспечивающий ввод и вывод данных при помощи сигналов сухих контактов, интерфейсы последовательной передачи данных RS232, RS422, RS485 по протоколам JBUS/MODBUS, PROFIBUS или DEVICENET, MODBUS TCP (JBUS/MODBUS-туннелирование), интерфейс NET VISION для локальной сети Ethernet, программное обеспечение TOP VISION для выполнения мониторинга с помощью рабочей станции Windows XP PRO — все это позволяет контролировать работу ИБП удобным для пользователя способом.
Весь контроль управления ИБП, ДГУ, контроль окружающей среды сводится в единый диспетчерский пункт посредством протоколов JBUS/MODBUS.
Индустриальный подход
Третий метод основан на использовании высокоскоростной индустриальной интерфейсной шины: CANBus, JBus, MODBus, PROFIBus и проч. Некоторые модели ИБП поддерживают разновидность универсального smart-слота для установки как карточек SNMP, так и интерфейсной шины. Система мониторинга на базе индустриальной шины может быть интегрирована в уже существующую промышленную SCADA-систему контроля и получения данных либо создана как заказное решение на базе многофункциональных стандартных контроллеров с выходом на шину. Промышленная шина через шлюзы передает информацию на удаленный диспетчерский пункт или в систему управления зданием (Building Management System, BMS). В эту систему могут быть интегрированы и контроллеры, управляющие ИБП.
Универсальные SCADA-системы поддерживают датчики и контроллеры широкого перечня производителей, но они недешевы и к тому же неудобны для внесения изменений. Но если подобная система уже функционирует на объекте, то интеграция в нее дополнительных ИБП не представляет труда.
Сергей Ермаков, технический директор компании Inelt, считает, что применение универсальных систем управления на базе промышленных контроллеров нецелесообразно, если используется для мониторинга только ИБП и ДГУ. Один из практичных подходов — создание заказной системы, с удобной для заказчика графической оболочкой и необходимым уровнем детализации — от карты местности до поэтажного плана и погружения в мнемосхему компонентов ИБП.
— ИБП может передавать одинаковое количество информации о своем состоянии и по прямому соединению, и по SNMP, и по Bus-шине, — говорит Сергей Ермаков. — Применение того или иного метода зависит от конкретной задачи и бюджета. Создав первоначально систему UPS Look для мониторинга ИБП, мы интегрировали в нее систему мониторинга ДГУ на основе SNMP-протокола, после чего по желанию одного из заказчиков конвертировали эту систему на промышленную шину Jbus. Новое ПО JSLook для мониторинга неограниченного количества ИБП и ДГУ по протоколу JBus является полнофункциональным средством мониторинга всей системы электроснабжения объекта.Профессиональное мение
Денис Андреев, руководитель департамента ИБП компании Landata
Практически все ИБП Eaton позволяют использовать коммуникационную Web-SNMP плату Connect UPS и датчик EMP (Environmental Monitoring Probe). Такой комплект позволяет в числе прочего осуществлять мониторинг температуры, влажности и состояния пары «сухих» контактов, к которым можно подключить внешние датчики.
Решение Eaton Environmental Rack Monitor представляет собой аналог такой связки, но с существенно более широким функционалом. Внешне эта система мониторинга температуры, влажности и состояния «сухих» контактов выполнена в виде компактного устройства, которое занимает минимум места в шкафу или в помещении.
Благодаря наличию у Eaton Environmental Rack Monitor (ERM) двух выходов датчики температуры или влажности можно разместить в разных точках стойки или помещения. Поскольку каждый из двух датчиков имеет еще по два сухих контакта, с них дополнительно можно принимать сигналы от датчиков задымления, утечки и проч. В центре обработки данных такая недорогая система ERM, состоящая из неограниченного количества датчиков, может транслировать информацию по протоколу SNMP в HTML-страницу и позволяет, не приобретая специального ПО, получить сводную таблицу измеряемых величин через веб-браузер.
Проблему дефицита пространства и высокой плотности размещения оборудования в серверных и ЦОД решают системы распределения питания линейки Eaton eDPU, которые можно установить как внутри стойки, так и на группу стоек.
Все модели этой линейки представляют четыре семейства: системы базового исполнения, системы с индикацией потребляемого тока, с мониторингом (локальным и удаленным, по сети) и управляемые, с возможностью мониторинга и управления электропитанием вплоть до каждой розетки. С помощью этих устройств можно компактным способом увеличить количество розеток в одной стойке, обеспечить контроль уровня тока и напряжения критичной нагрузки.
Контроль уровня потребляемой мощности может осуществляться с высокой степенью детализации, вплоть до сервера, подключенного к конкретной розетке. Это позволяет выяснить, какой сервер перегревается, где вышел из строя вентилятор, блок питания и т. д. Программным образом можно запустить сервер, подключенный к розетке ePDU. Интеграция системы контроля ePDU в платформу управления Eaton находится в процессе реализации.Требование объекта
Как поясняет Олег Письменский, в критичных объектах, таких как ЦОД, можно условно выделить две области контроля и управления. Первая, Grey Space, — это собственно здание и соответствующая система его энергообеспечения и энергораспределения. Вторая, White Space, — непосредственно машинный зал с его системами.
Выбор системы управления энергообеспечением ЦОД определяется типом объекта, требуемым функционалом системы управления и отведенным на эти цели бюджетом. В большинстве случаев кратковременная задержка между наступлением события и получением информации о нем системой мониторинга по SNMP-протоколу допустима. Тем не менее в целом ряде случаев, если характеристики объекта подразумевают непрерывность его функционирования, объект является комплексным и содержит большое количество элементов, требующих контроля и управления в реальном времени, ни одна стандартная система SNMP-мониторинга не обеспечит требуемого функционала. Для таких объектов применяют системы управления real-time, построенные на базе программно-аппаратных комплексов сбора данных, в том числе c функциями Softlogic.
Системы диспетчеризации и управления крупными объектами реализуются SCADA-системами, широкий перечень которых сегодня присутствует на рынке; представлены они и в портфеле решений Schneider Electric. Тип SCADA-системы зависит от класса и размера объекта, от количества его элементов, требующих контроля и управления, от уровня надежности. Частный вид реализации SCADA — это BMS-система(Building Management System).
«Дата-центры с объемом потребляемой мощности до 1,5 МВт и уровнем надежности Tier I, II и, с оговорками, даже Tier III, могут обслуживаться без дополнительной SCADA-системы, — говорит Олег Письменский. — На таких объектах целесообразно применять ISX Central — программно-аппаратный комплекс, использующий SNMP. Если же категория и мощность однозначно предполагают непрерывность управления, в таких случаях оправданна комбинация SNMP- и SCADA-системы. Например, для машинного зала (White Space) применяется ISX Central с возможными расширениями как Change & Capacity Manager, в комбинации со SCADA-системой, управляющей непосредственно объектом (Grey Space)».Профессиональное мнение
Олег Письменский, директор департамента консалтинга APC by Schneider Electric в России и СНГ
Подход APC by Schneider Electric к реализации полномасштабного полноуправляемого и надежного ЦОД изначально был основан на базисных принципах управления ИТ-инфраструктурой в рамках концепции ITIL/ITSM. И история развития системы управления инфраструктурой ЦОД ISX Manager, которая затем интегрировалась с программно-аппаратным комплексом NetBotz и трансформировалась в портал диспетчеризации ISX Central, — лучшее тому доказательство.
Первым итогом поэтапного приближения к намеченной цели стало наращивание функций контроля параметров энергообеспечения. Затем в этот контур подключилась система управления кондиционированием, система контроля параметров окружающей среды. Очередным шагом стало измерение скорости воздуха, влажности, пыли, радиации, интеграция сигналов от камер аудио- и видеонаблюдения, системы управления блоками розеток, завершения работы сервера и т. д.
Эта система не может и не должна отвечать абсолютно всем принципам ITSM, потому что не все они касаются существа поставленной задачи. Но как только в отношении политик и некоторых тактик управления емкостью и изменениями в ЦОД потребовался соответствующий инструментарий — это нашло отражение в расширении функционала ISX Central, который в настоящее время реализуют ПО APC by Schneider Electric Capacity Manager и APC by Schneider Electric Change Manager. С появлением этих двух решений, интегрированных в систему управления реальным объектом, АРС предоставляет возможность службе эксплуатации оптимально планировать изменения количественного и качественного состава оборудования машинного зала — как на ежедневном оперативном уровне, так и на уровне стратегических задач массовых будущих изменений.
Решение APC by Schneider Electric Capacity обеспечивает автоматизированную обработку информации о свободных ресурсах инженерной инфраструктуры, реальном потреблении мощности и пространстве в стойках. Обращаясь к серверу ISX Central, системы APC by Schneider Electric Capacity Manager и APC by Schneider Electric Change Manager оценивают степень загрузки ИБП и систем охлаждения InRow, прогнозируют воздействие предполагаемых изменений и предлагают оптимальное место для установки нового или перестановки имеющегося оборудования. Новые решения позволяют, выявив последствия от предполагаемых изменений, правильно спланировать замену оборудования в ЦОД.
Переход от частного к общему может потребовать интеграции ISX Central в такие, например, порталы управления, как Tivoli или Open View. Возможны и другие сценарии, когда ISX Central вписывается и в SCADA–систему. В этом случае ISX Central выполняет роль диспетчерской настройки, функционал которой распространяется на серверную комнату, но не охватывает целиком периметр объекта.Случай из практики
Решение задачи управления энергообеспечением ЦОД иногда вступает в противоречие с правилами устройств электроустановок (ПУЭ). Может оказаться, что в соответствии с ПУЭ в ряде случаев (например, при компоновке щитов ВРУ) необходимо обеспечить механические блокировки. Однако далеко не всегда это удается сделать. Поэтому такая задача часто требует нетривиального решения.
— В одном из проектов, — вспоминает Алексей Сарыгин, — где система управления включала большое количество точек со взаимными пересечениями блокировок, требовалось не допустить снижения общей надежности системы. В этом случае мы пришли к осознанному компромиссу, сделали систему полуавтоматической. Там, где это было возможно, присутствовали механические блокировки, за пультом дежурной смены были оставлены функции мониторинга и анализа, куда сводились все данные о положении всех автоматов. Но исполнительную часть вывели на отдельную панель управления уже внутри ВРУ, где были расположены подробные пользовательские инструкции по оперативному переключению. Таким образом мы избавились от излишней автоматизации, но постарались минимизировать потери в надежности и защититься от ошибок персонала.
[ http://www.computerra.ru/cio/old/products/infrastructure/421312/]Тематики
EN
Русско-английский словарь нормативно-технической терминологии > управление электропитанием
12 протокол управления простой сетью
протокол управления простой сетью
Протокол, управляющий сетью, сетевыми устройствами и их функциями.
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]
простой протокол сетевого управления
Прикладной протокол (L7) управления сетевыми устройствами. Основное предназначение состоит в получении подробной информации о состоянии устройства и изменении его конфигурации в автоматическом режиме. Помимо периодического считывания SNMP-сервером информации с устройства, возможна активная сигнализация самим устройством о произошедших событиях.
[ http://www.morepc.ru/dict/]
простой протокол управления сетью
Протокол группы IETF по управлению сетью. Основной протокол администрирования сетей TCP/IP, обеспечивающий мониторинг и контроль сетевых устройств, обслуживание их конфигураций, сбор статистических данных, замеры производительности и проверку безопасности (МСЭ-Т Х.805; МСЭ-Т J.116).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Вопросы сетевого управления традиционно входят в число основных как для производителей программ и оборудования, так и для организаций, занимающихся разработкой стандартов. Невероятно высокий темп развития сетей на базе протокола TCP/IP (и Internet в частности) и движение в сторону создания единой информационной магистрали обусловили необходимость разработки стандартного протокола управления устройствами по сети и множества высокоуровневых продуктов, которые его используют.
Протокол управления сетями определяет стандартный метод контроля какого-либо устройства со станции управления с целью определения его состояния, настроек и иной информации, а также ее модификации. Основным протоколом управления, используемым в семействе TCP/IP, является протокол SNMP (Simple Network Management Protocol простой протокол управления сетью). Сам протокол очень прост: он определяет только иерархическое пространство имен объектов управления и способ чтения (или записи) данных этих объектов на каждом узле. Основное преимущество этого протокола заключается в том, что он позволяет единообразным образом управлять всеми типами аппаратных средств, независимо от их назначения и особенностей. Все они говорят на одном языке и могут опрашиваться и конфигурироваться с центральной станции.
Однако, SNMP не более чем протокол, поддерживающий диалог двух сторон. Для его использования необходимы две составляющие: программа-агент, работающая на сетевом устройстве, и программа-менеджер, позволяющая дистанционно отслеживать и управлять сетевыми устройствами. Способ ведения диалога между агентом и менеджером показан на рис.1.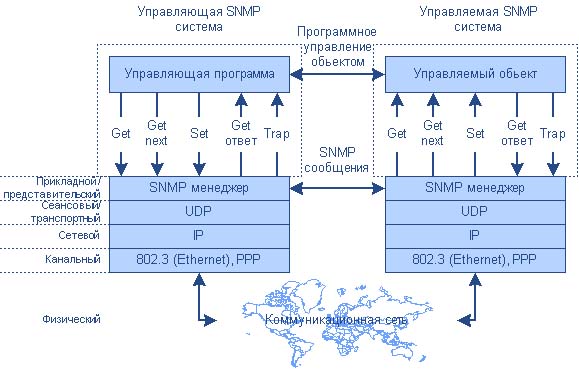
Рис. 1 Работа протокола SNMP в рамках модели OSI
Протокол SNMP традиционно используется для управления телекоммуникационным оборудованием. Для управления обычно применяются так называемые платформы сетевого управления, позволяющие осуществлять обнаружение устройств в сети, объединять модули управления оборудованием разных производителей, выполнять общие функции управления и оповещения. В число наиболее известных платформ сетевого управления входят HP OpenView (Hewlett-Packard), Solstice Domain Manager (Sun Microsystems), Tivoli NetView (Tivoli Systems), SNMPc (Castle Rock). Вместе с тем, управление с использованием SNMP может быть применено и для решения других задач в том числе для систем промышленного управления. Проиллюстрируем такой подход на реальном примере.
В ходе выполнения одного из экспортных контрактов корпорацией Стинс Коман была разработана, произведена и установлена на ТЭС Фалай (Вьетнам) система управления электрофильтром. Логически система была разделена на два уровня: нижний монтируемый в непосредственной близости от электрофильтра, и верхний осуществляющий сбор статистической информации и представляющий графически состояние всего объекта. От использования существующих SCADA-систем мы отказались из-за высокой стоимости пакета разработки и модулей времени выполнения, а также большого времени, необходимого на обучение разработчиков. Было решено пойти по пути собственной разработки. Связь между подсистемами верхнего и нижнего уровней была осуществлена традиционными для задач АСУ ТП методами. Из огромного количества используемых полевых протоколов был выбран один, наиболее подходящий по быстродействию и простоте реализации. Учитывая особенности этого протокола, был разработан программный комплекс, осуществляющий сбор информации, анализирующий статистику и графически представляющий состояние управляемого устройства.
Приступив к аналогичным работам по следующему контракту, мы постарались учесть уроки предыдущей разработки и при создании системы управления технологическими процессами воспользоваться нашим опытом проектирования больших сетевых комплексов. В новом варианте системы связь между уровнями осуществлялась по протоколу SNMP. В качестве программы верхнего уровня использовался описанный ниже универсальный SNMP-менеджер.
Использование принципов сетевого управления при создании систем управления технологическими процессами позволило избежать проблем, связанных с интеграцией различных уровней системы. Появился единый универсальный способ управления любым оборудованием, начиная от сетевого маршрутизатора и заканчивая электрофильтром. Для того чтобы появилась возможность управлять устройствами, которые ранее в принципе не подключались к сети, был разработан универсальный программно-аппаратный SNMP-агент eSCape. Это устройство построено на основе однокристального RISC-контроллера и для подключения к сети (локальной или территориально-распределенной) использует Ethernet или PPP. Оно обладает малым весом и невысокой стоимостью и предоставляет широкий выбор вариантов сопряжения с управляемым объектом.
При разработке системы промышленного управления, реализованной в виде SNMP-менеджера, изначально были сформулированы следующие требования:- новый программный продукт должен обеспечивать сбор и хранение статистических данных, которые должны легко импортироваться в другие программы;
- новый программный продукт должен работать как под управлением ОС MS Windows 9x/NT/2000, так и под управлением ОС Linux;
- новый программный продукт должен обеспечивать достаточное быстродействие на машинах бюджетного класса;
- для разработки программ рекомендуется использовать свободно распространяемые продукты с открытым исходным кодом.
В результате был разработан программный комплекс EscView, архитектура которого приведена на рис.2.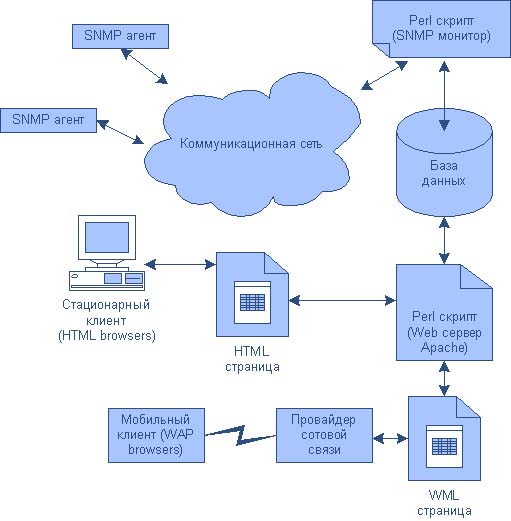
Рис.2 Программный комплекс, осуществляющий сбор информации, анализ статистики и графическое представление состояния управляемого устройства
Каждому управляемому устройству соответствует SNMP-агент, который может быть встроенным или внешним. SNMP-агенты, подключенные к сети протокола TCP/IP, периодически опрашиваются программой-монитором, которая написана на языке Perl. Периодичность и частота опроса, а также перечень интересующих SNMP-агентов записаны в базе данных, построенной на пакете программ MySQL. Все переменные, считанные в процессе опроса, сохраняются в базе данных. SNMP-агент может также сам проинформировать систему управления о том или ином изменении своего состояния. Для подачи команд устройствам необходимо изменить соответствующие поля базы данных. Все изменения, произошедшие в базе данных, адресно передаются SNMP-агентам.
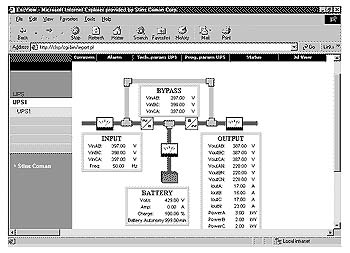
Рис.3 Пример диалога с пользователем в формате HTML-страницы
Для реализации графического интерфейса пользователя используется HTTP-сервер Apache. Программа, написанная на языке Perl, поддерживает диалоги с пользователем и при помощи базы данных динамически формирует ответ в формате HTML-страницы или в формате WML-страницы.
Страницы HTML предназначены для пользователей, работающих с любым Internet-браузером (например, MS Internet Explorer или Netscape Navigator). Пример реального диалога представлен на рис.3. Страницы WML предназначены для мобильных устройств, поддерживающих протокол WAP (таким устройством может быть сотовый телефон). Для поддержки WAP-клиентов никаких специальных аппаратных доработок производить не надо: в качестве шлюза выступают ресурсы, штатно предоставляемые сотовыми операторами. Соединение между сотовым шлюзом и SNMP-менеджером осуществляется через Internet.
Данное решение может функционировать как под управлением ОС MS Windows 9x/NT/2000, так и под управлением ОС UNIX/Linux. Все программные продукты, используемые при разработке, распространяются свободно.
Описываемое решение уже используется для обслуживания мощных источников бесперебойного питания. В настоящее время на базе этого решения разрабатывается комплекс программ, предназначенных для управления электрофильтром. Оно, в частности, может использоваться для создания интеллектуальных зданий, для распределенного сбора информации с датчиков, а также для реализации заданного промышленного управления через типовые объединённые сети.
[ http://www.mka.ru/?p=40138]Тематики
Действия
Синонимы
EN
Русско-английский словарь нормативно-технической терминологии > протокол управления простой сетью
13 система глобального позиционирования
система глобального позиционирования
СГП
Навигационная спутниковая система, обеспечивающая пользователей информацией о месте нахождения, скорости и времени в любой точке Земли. Система использует навигационные спутники. При проектировании системы планировалось вывести 24 спутника на квази стационарные орбиты. Такие системы обеспечивают круглосуточную информацию о трехмерном положении, скорости и времени для пользователей, обладающих соответствующим оборудованием и находящихся на или вблизи земной поверхности (а иногда и вне её). Первой системой GPS, широко доступной гражданским пользователям, стала NAVSTAR, обслуживаемая Министерством обороны США.
[ http://www.morepc.ru/dict/]
система глобального позиционирования
GPS представляет собой спутниковую технологию позиционирования, которая позволяет при помощи GPS-приемника определять свои координаты в любой точке мира. Приемники GPS производятся в виде наладонных устройств, навигационных систем для автомобилей, а также модулей, устанавливаемых в карманные ПК (PDA), например, PalmPilot.
[ http://www.sotovik.ru/lib/news_article/news_26322.html]Тематики
EN
Русско-английский словарь нормативно-технической терминологии > система глобального позиционирования
14 трехфазный источник бесперебойного питания (ИБП)
трехфазный ИБП
-
[Интент]
Глава 7. Трехфазные ИБП... ИБП большой мощности (начиная примерно с 10 кВА) как правило предназначены для подключения к трехфазной электрической сети. Диапазон мощностей 8-25 кВА – переходный. Для такой мощности делают чисто однофазные ИБП, чисто трехфазные ИБП и ИБП с трехфазным входом и однофазным выходом. Все ИБП, начиная примерно с 30 кВА имеют трехфазный вход и трехфазный выход. Трехфазные ИБП имеют и другое преимущество перед однофазными ИБП. Они эффективно разгружают нейтральный провод от гармоник тока и способствуют более безопасной и надежной работе больших компьютерных систем. Эти вопросы рассмотрены в разделе "Особенности трехфазных источников бесперебойного питания" главы 8. Трехфазные ИБП строятся обычно по схеме с двойным преобразованием энергии. Поэтому в этой главе мы будем рассматривать только эту схему, несмотря на то, что имеются трехфазные ИБП, построенные по схеме, похожей на ИБП, взаимодействующий с сетью.
Схема трехфазного ИБП с двойным преобразованием энергии приведена на рисунке 18.
Рис.18. Трехфазный ИБП с двойным преобразованием энергииКак видно, этот ИБП не имеет почти никаких отличий на уровне блок-схемы, за исключением наличия трех фаз. Для того, чтобы увидеть отличия от однофазного ИБП с двойным преобразованием, нам придется (почти впервые в этой книге) несколько подробнее рассмотреть элементы ИБП. Мы будем проводить это рассмотрение, ориентируясь на традиционную технологию. В некоторых случаях будут отмечаться схемные особенности, позволяющие улучшить характеристики.
Выпрямитель
Слева на рис 18. – входная электрическая сеть. Она включает пять проводов: три фазных, нейтраль и землю. Между сетью и ИБП – предохранители (плавкие или автоматические). Они позволяют защитить сеть от аварии ИБП. Выпрямитель в этой схеме – регулируемый тиристорный. Управляющая им схема изменяет время (долю периода синусоиды), в течение которого тиристоры открыты, т.е. выпрямляют сетевое напряжение. Чем большая мощность нужна для работы ИБП, тем дольше открыты тиристоры. Если батарея ИБП заряжена, на выходе выпрямителя поддерживается стабилизированное напряжение постоянного тока, независимо от нвеличины напряжения в сети и мощности нагрузки. Если батарея требует зарядки, то выпрямитель регулирует напряжение так, чтобы в батарею тек ток заданной величины.
Такой выпрямитель называется шести-импульсным, потому, что за полный цикл трехфазной электрической сети он выпрямляет 6 полупериодов сингусоиды (по два в каждой из фаз). Поэтому в цепи постоянного тока возникает 6 импульсов тока (и напряжения) за каждый цикл трехфазной сети. Кроме того, во входной электрической сети также возникают 6 импульсов тока, которые могут вызвать гармонические искажения сетевого напряжения. Конденсатор в цепи постоянного тока служит для уменьшения пульсаций напряжения на аккумуляторах. Это нужно для полной зарядки батареи без протекания через аккумуляторы вредных импульсных токов. Иногда к конденсатору добавляется еще и дроссель, образующий совместно с конденсатором L-C фильтр.
Коммутационный дроссель ДР уменьшает импульсные токи, возникающие при открытии тиристоров и служит для уменьшения искажений, вносимых выпрямителем в электрическую сеть. Для еще большего снижения искажений, вносимых в сеть, особенно для ИБП большой мощности (более 80-150 кВА) часто применяют 12-импульсные выпрямители. Т.е. за каждый цикл трехфазной сети на входе и выходе выпрямителя возникают 12 импульсов тока. За счет удвоения числа импульсов тока, удается примерно вдвое уменьшить их амплитуду. Это полезно и для аккумуляторов и для электрической сети.
Двенадцати-импульсный выпрямитель фактически состоит из двух 6-импульсных выпрямителей. На вход второго выпрямителя (он изображен ниже на рис. 18) подается трехфазное напряжение, прошедшее через трансформатор, сдвигающий фазу на 30 градусов.
В настоящее время применяются также и другие схемы выпрямителей трехфазных ИБП. Например схема с пассивным (диодным) выпрямителем и преобразователем напряжения постоянного тока, применение которого позволяет приблизить потребляемый ток к синусоидальному.
Наиболее современным считается транзисторный выпрямитель, регулируемый высокочастотной схемой широтно-импульсной модуляции (ШИМ). Применение такого выпрямителя позволяет сделать ток потребления ИБП синусоидальным и совершенно отказаться от 12-импульсных выпрямителей с трансформатором.
Батарея
Для формирования батареи трехфазных ИБП (как и в однофазных ИБП) применяются герметичные свинцовые аккумуляторы. Обычно это самые распространенные модели аккумуляторов с расчетным сроком службы 5 лет. Иногда используются и более дорогие аккумуляторы с большими сроками службы. В некоторых трехфазных ИБП пользователю предлагается фиксированный набор батарей или батарейных шкафов, рассчитанных на различное время работы на автономном режиме. Покупая ИБП других фирм, пользователь может более или менее свободно выбирать батарею своего ИБП (включая ее емкость, тип и количество элементов). В некоторых случаях батарея устанавливается в корпус ИБП, но в большинстве случаев, особенно при большой мощности ИБП, она устанавливается в отдельном корпусе, а иногда и в отдельном помещении.
Инвертор
Как и в ИБП малой мощности, в трехфазных ИБП применяются транзисторные инверторы, управляемые схемой широтно-импульсной модуляции (ШИМ). Некоторые ИБП с трехфазным выходом имеют два инвертора. Их выходы подключены к трансформаторам, сдвигающим фазу выходных напряжений. Даже в случае применения относительно низкочастоной ШИМ, такая схема совместно с применением фильтра переменного тока, построенного на трансформаторе и конденсаторах, позволяет обеспечить очень малый коэффициент гармонических искажений на выходе ИБП (до 3% на линейной нагрузке). Применение двух инверторов увеличивает надежность ИБП, поскольку даже при выходе из строя силовых транзисторов одного из инверторов, другой инвертор обеспечит работу нагрузки, пусть даже при большем коэффициенте гармонических искажений.
В последнее время, по мере развития технологии силовых полупроводников, начали применяться более высокочастотные транзисторы. Частота ШИМ может составлять 4 и более кГц. Это позволяет уменьшить гармонические искажения выходного напряжения и отказаться от применения второго инвертора. В хороших ИБП существуют несколько уровней защиты инвертора от перегрузки. При небольших перегрузках инвертор может уменьшать выходное напряжение (пытаясь снизить ток, проходящий через силовые полупроводники). Если перегрузка очень велика (например нагрузка составляет более 125% номинальной), ИБП начинает отсчет времени работы в условиях перегрузки и через некоторое время (зависящее от степени перегрузки – от долей секунды до минут) переключается на работу через статический байпас. В случае большой перегрузки или короткого замыкания, переключение на статический байпас происходит сразу.
Некоторые современные высококлассные ИБП (с высокочакстотной ШИМ) имеют две цепи регулирования выходного напряжения. Первая из них осуществляет регулирование среднеквадратичного (действующего) значения напряжения, независимо для каждой из фаз. Вторая цепь измеряет мгновенные значения выходного напряжения и сравнивает их с хранящейся в памяти блока управления ИБП идеальной синусоидой. Если мгновенное значение напряжения отклонилось от соотвествующего "идеального" значения, то вырабатывается корректирующий импульс и форма синусоиды выходного напряжения исправляется. Наличие второй цепи обратной связи позволяет обеспечить малые искажения формы выходного напряжения даже при нелинейных нагрузках.
Статический байпас
Блок статического байпаса состоит из двух трехфазных (при трехфазном выходе) тиристорных переключателей: статического выключателя инвертора (на схеме – СВИ) и статического выключателя байпаса (СВБ). При нормальной работе ИБП (от сети или от батареи) статический выключатель инвертора замкнут, а статический выключатель байпаса разомкнут. Во время значительных перегрузок или выхода из строя инвертора замкнут статический переключатель байпаса, переключатель инвертора разомкнут. В момент переключения оба статических переключателя на очень короткое время замкнуты. Это позволяет обеспечить безразрывное питание нагрузки.
Каждая модель ИБП имеет свою логику управления и, соответственно, свой набор условий срабатывания статических переключателей. При покупке ИБП бывает полезно узнать эту логику и понять, насколько она соответствует вашей технологии работы. В частности хорошие ИБП сконструированы так, чтобы даже если байпас недоступен (т.е. отсутствует синхронизация инвертора и байпаса – см. главу 6) в любом случае постараться обеспечить электроснабжение нагрузки, пусть даже за счет уменьшения напряжения на выходе инвертора.
Статический байпас ИБП с трехфазным входом и однофазным выходом имеет особенность. Нагрузка, распределенная на входе ИБП по трем фазным проводам, на выходе имеет только два провода: один фазный и нейтральный. Статический байпас тоже конечно однофазный, и синхронизация напряжения инвертора производится относительно одной из фаз трехфазной сети (любой, по выбору пользователя). Вся цепь, подводящая напряжение к входу статического байпаса должна выдерживать втрое больший ток, чем входной кабель выпрямителя ИБП. В ряде случаев это может вызвать трудности с проводкой.
Сервисный байпас
Трехфазные ИБП имеют большую мощность и обычно устанавливаются в местах действительно критичных к электропитанию. Поэтому в случае выхода из строя какого-либо элемента ИБП или необходимости проведения регламентных работ (например замены батареи), в большинстве случае нельзя просто выключить ИБП или поставить на его место другой. Нужно в любой ситуации обеспечить электропитание нагрузки. Для этих ситуаций у всех трехфазных ИБП имеется сервисный байпас. Он представляет собой ручной переключатель (иногда как-то заблокированный, чтобы его нельзя было включить по ошибке), позволяющий переключить нагрузку на питание непосредственно от сети. У большинства ИБП для переключения на сервисный байпас существует специальная процедура (определенная последовательность действий), которая позволяет обеспечит непрерывность питания при переключениях.
Режимы работы трехфазного ИБП с двойным преобразованием
Трехфазный ИБП может работать на четырех режимах работы.
- При нормальной работе нагрузка питается по цепи выпрямитель-инвертор стабилизированным напряжением, отфильтрованным от импульсов и шумов за счет двойного преобразования энергии.
- Работа от батареи. На это режим ИБП переходит в случае, если напряжение на выходе ИБП становится таким маленьким, что выпрямитель оказывается не в состоянии питать инвертор требуемым током, или выпрямитель не может питать инвертор по другой причине, например из-за поломки. Продолжительность работы ИБП от батареи зависит от емкости и заряда батареи, а также от нагрузки ИБП.
- Когда какой-нибудь инвертор выходит из строя или испытывает перегрузку, ИБП безразрывно переходит на режим работы через статический байпас. Нагрузка питается просто от сети через вход статического байпаса, который может совпадать или не совпадать со входом выпрямителя ИБП.
- Если требуется обслуживание ИБП, например для замены батареи, то ИБП переключают на сервисный байпас. Нагрузка питается от сети, а все цепи ИБП, кроме входного выключателя сервисного байпаса и выходных выключателей отделены от сети и от нагрузки. Режим работы на сервисном байпасе не является обязательным для небольших однофазных ИБП с двойным преобразованием. Трехфазный ИБП без сервисного байпаса немыслим.
Надежность
Трехфазные ИБП обычно предназначаются для непрерывной круглосуточной работы. Работа нагрузки должна обеспечиваться практически при любых сбоях питания. Поэтому к надежности трехфазных ИБП предъявляются очень высокие требования. Вот некоторые приемы, с помощью которых производители трехфазных ИБП могут увеличивать надежность своей продукции. Применение разделительных трансформаторов на входе и/или выходе ИБП увеличивает устойчивость ИБП к скачкам напряжения и нагрузки. Входной дроссель не только обеспечивает "мягкий запуск", но и защищает ИБП (и, в конечном счете, нагрузку) от очень быстрых изменений (скачков) напряжения.
Обычно фирма выпускает целый ряд ИБП разной мощности. В двух или трех "соседних по мощности" ИБП этого ряда часто используются одни и те же полупроводники. Если это так, то менее мощный из этих двух или трех ИБП имеет запас по предельному току, и поэтому несколько более надежен. Некоторые трехфазные ИБП имеют повышенную надежность за счет резервирования каких-либо своих цепей. Так, например, могут резервироваться: схема управления (микропроцессор + платы "жесткой логики"), цепи управления силовыми полупроводниками и сами силовые полупроводники. Батарея, как часть ИБП тоже вносит свой вклад в надежность прибора. Если у ИБП имеется возможность гибкого выбора батареи, то можно выбрать более надежный вариант (батарея более известного производителя, с меньшим числом соединений).
Преобразователи частоты
Частота напряжения переменного тока в электрических сетях разных стран не обязательно одинакова. В большинстве стран (в том числе и в России) распространена частота 50 Гц. В некоторых странах (например в США) частота переменного напряжения равна 60 Гц. Если вы купили оборудование, рассчитанное на работу в американской электрической сети (110 В, 60 Гц), то вы должны каким-то образом приспособить к нему нашу электрическую сеть. Преобразование напряжения не является проблемой, для этого есть трансформаторы. Если оборудование оснащено импульсным блоком питания, то оно не чувствительно к частоте и его можно использовать в сети с частотой 50 Гц. Если же в состав оборудования входят синхронные электродвигатели или иное чувствительное к частоте оборудование, вам нужен преобразователь частоты. ИБП с двойным преобразованием энергии представляет собой почти готовый преобразователь частоты.
В самом деле, ведь выпрямитель этого ИБП может в принципе работать на одной частоте, а инвертор выдавать на своем выходе другую. Есть только одно принципиальное ограничение: невозможность синхронизации инвертора с линией статического байпаса из-за разных частот на входе и выходе. Это делает преобразователь частоты несколько менее надежным, чем сам по себе ИБП с двойным преобразованием. Другая особенность: преобразователь частоты должен иметь мощность, соответствующую максимальному возможному току нагрузки, включая все стартовые и аварийные забросы, ведь у преобразователя частоты нет статического байпаса, на который система могла бы переключиться при перегрузке.
Для изготовления преобразователя частоты из трехфазного ИБП нужно разорвать цепь синхронизации, убрать статический байпас (или, вернее, не заказывать его при поставке) и настроить инвертор ИБП на работу на частоте 60 Гц. Для большинства трехфазных ИБП это не представляет проблемы, и преобразователь частоты может быть заказан просто при поставке.
ИБП с горячим резервированием
В некоторых случаях надежности даже самых лучших ИБП недостаточно. Так бывает, когда сбои питания просто недопустимы из-за необратимых последствий или очень больших потерь. Обычно в таких случаях в технике применяют дублирование или многократное резервирование блоков, от которых зависит надежность системы. Есть такая возможность и для трехфазных источников бесперебойного питания. Даже если в конструкцию ИБП стандартно не заложено резервирование узлов, большинство трехфазных ИБП допускают резервирование на более высоком уровне. Резервируется целиком ИБП. Простейшим случаем резервирования ИБП является использование двух обычных серийных ИБП в схеме, в которой один ИБП подключен к входу байпаса другого ИБП.
Рис. 19а. Последовательное соединение двух трехфазных ИБП
На рисунке 19а приведена схема двух последовательно соединенным трехфазных ИБП. Для упрощения на рисунке приведена, так называемая, однолинейная схема, на которой трем проводам трехфазной системы переменного тока соответствует одна линия. Однолинейные схемы часто применяются в случаях, когда особенности трехфазной сети не накладывают отпечаток на свойства рассматриваемого прибора. Оба ИБП постоянно работают. Основной ИБП питает нагрузку, а вспомогательный ИБП работает на холостом ходу. В случае выхода из строя основного ИБП, нагрузка питается не от статического байпаса, как в обычном ИБП, а от вспомогательного ИБП. Только при выходе из строя второго ИБП, нагрузка переключается на работу от статического байпаса.
Система из двух последовательно соединенных ИБП может работать на шести основных режимах.
А. Нормальная работа. Выпрямители 1 и 2 питают инверторы 1 и 2 и, при необходимости заряжают батареи 1 и 2. Инвертор 1 подключен к нагрузке (статический выключатель инвертора 1 замкнут) и питает ее стабилизированным и защищенным от сбоев напряжением. Инвертор 2 работает на холостом ходу и готов "подхватить" нагрузку, если инвертор 1 выйдет из строя. Оба статических выключателя байпаса разомкнуты.
Для обычного ИБП с двойным преобразованием на режиме работы от сети допустим (при сохранении гарантированного питания) только один сбой в системе. Этим сбоем может быть либо выход из строя элемента ИБП (например инвертора) или сбой электрической сети.
Для двух последовательно соединенных ИБП с на этом режиме работы допустимы два сбоя в системе: выход из строя какого-либо элемента основного ИБП и сбой электрической сети. Даже при последовательном или одновременном возникновении двух сбоев питание нагрузки будет продолжаться от источника гарантированного питания.
Б. Работа от батареи 1. Выпрямитель 1 не может питать инвертор и батарею. Чаще всего это происходит из-за отключения напряжения в электрической сети, но причиной может быть и выход из строя выпрямителя. Состояние инвертора 2 в этом случае зависит от работы выпрямителя 2. Если выпрямитель 2 работает (например он подключен к другой электрической сети или он исправен, в отличие от выпрямителя 1), то инвертор 2 также может работать, но работать на холостом ходу, т.к. он "не знает", что с первым ИБП системы что-то случилось. После исчерпания заряда батареи 1, инвертор 1 отключится и система постарается найти другой источник электроснабжения нагрузки. Им, вероятно, окажется инвертор2. Тогда система перейдет к другому режиму работы.
Если в основном ИБП возникает еще одна неисправность, или батарея 1 полностью разряжается, то система переключается на работу от вспомогательного ИБП.
Таким образом даже при двух сбоях: неисправности основного ИБП и сбое сети нагрузка продолжает питаться от источника гарантированного питания.
В. Работа от инвертора 2. В этом случае инвертор 1 не работает (из-за выхода из строя или полного разряда батареи1). СВИ1 разомкнут, СВБ1 замкнут, СВИ2 замкнут и инвертор 2 питает нагрузку. Выпрямитель 2, если в сети есть напряжение, а сам выпрямитель исправен, питает инвертор и батарею.
На этом режиме работы допустим один сбой в системе: сбой электрической сети. При возникновении второго сбоя в системе (выходе из строя какого-либо элемента вспомогательного ИБП) электропитание нагрузки не прерывается, но нагрузка питается уже не от источника гарантированного питания, а через статический байпас, т.е. попросту от сети.
Г. Работа от батареи 2. Наиболее часто такая ситуация может возникнуть после отключения напряжения в сети и полного разряда батареи 1. Можно придумать и более экзотическую последовательность событий. Но в любом случае, инвертор 2 питает нагругку, питаясь, в свою очередь, от батареи. Инвертор 1 в этом случае отключен. Выпрямитель 1, скорее всего, тоже не работает (хотя он может работать, если он исправен и в сети есть напряжение).
После разряда батареи 2 система переключится на работу от статического байпаса (если в сети есть нормальное напряжение) или обесточит нагрузку.
Д. Работа через статический байпас. В случае выхода из строя обоих инверторов, статические переключатели СВИ1 и СВИ2 размыкаются, а статические переключатели СВБ1 и СВБ2 замыкаются. Нагрузка начинает питаться от электрической сети.
Переход системы к работе через статический байпас происходит при перегрузке системы, полном разряде всех батарей или в случае выхода из строя двух инверторов.
На этом режиме работы выпрямители, если они исправны, подзаряжают батареи. Инверторы не работают. Нагрузка питается через статический байпас.
Переключение системы на работу через статический байпас происходит без прерывания питания нагрузки: при необходимости переключения сначала замыкается тиристорный переключатель статического байпаса, и только затем размыкается тиристорный переключатель на выходе того инвертора, от которого нагрузка питалась перед переключением.
Е. Ручной (сервисный) байпас. Если ИБП вышел из строя, а ответственную нагрузку нельзя обесточить, то оба ИБП системы с соблюдением специальной процедуры (которая обеспечивает безразрыное переключение) переключают на ручной байпас. после этого можно производить ремонт ИБП.
Преимуществом рассмотренной системы с последовательным соединением двух ИБП является простота. Не нужны никакие дополнительные элементы, каждый из ИБП работает в своем штатном режиме. С точки зрения надежности, эта схема совсем не плоха:- в ней нет никакой лишней, (связанной с резервированием) электроники, соответственно и меньше узлов, которые могут выйти из строя.
Однако у такого соединения ИБП есть и недостатки. Вот некоторые из них.
- Покупая такую систему, вы покупаете второй байпас (на нашей схеме – он первый – СВБ1), который, вообще говоря, не нужен – ведь все необходимые переключения могут быть произведены и без него.
- Весь второй ИБП выполняет только одну функцию – резервирование. Он потребляет электроэнергию, работая на холостом ходу и вообще не делает ничего полезного (разумеется за исключением того времени, когда первый ИБП отказывается питать нагрузку). Некоторые производители предлагают "готовые" системы ИБП с горячим резервированием. Это значит, что вы покупаете систему, специально (еще на заводе) испытанную в режиме с горячим резервированием. Схема такой системы приведена на рис. 19б.
Рис.19б. Трехфазный ИБП с горячим резервированием
Принципиальных отличий от схемы с последовательным соединением ИБП немного.
- У второго ИБП отсутствует байпас.
- Для синхронизации между инвертором 2 и байпасом появляется специальный информационный кабель между ИБП (на рисунке не показан). Поэтому такой ИБП с горячим резервированием может работать на тех же шести режимах работы, что и система с последовательным подключением двух ИБП. Преимущество "готового" ИБП с резервированием, пожалуй только одно – он испытан на заводе-производителе в той же комплектации, в которой будет эксплуатироваться.
Для расмотренных схем с резервированием иногда применяют одно важное упрощение системы. Ведь можно отказаться от резервирования аккумуляторной батареи, сохранив резервирование всей силовой электроники. В этом случае оба ИБП будут работать от одной батареи (оба выпрямителя будут ее заряжать, а оба инвертора питаться от нее в случае сбоя электрической сети). Применение схемы с общей бетареей позволяет сэкономить значительную сумму – стоимость батареи.
Недостатков у схемы с общей батареей много:
- Не все ИБП могут работать с общей батареей.
- Батарея, как и другие элементы ИБП обладает конечной надежностью. Выход из строя одного аккумулятора или потеря контакта в одном соединении могут сделать всю системы ИБП с горячим резервирование бесполезной.
- В случае выхода из строя одного выпрямителя, общая батарея может быть выведена из строя. Этот последний недостаток, на мой взгляд, является решающим для общей рекомендации – не применять схемы с общей батареей.
Параллельная работа нескольких ИБПКак вы могли заметить, в случае горячего резервирования, ИБП резервируется не целиком. Байпас остается общим для обоих ИБП. Существует другая возможность резервирования на уровне ИБП – параллельная работа нескольких ИБП. Входы и выходы нескольких ИБП подключаются к общим входным и выходным шинам. Каждый ИБП сохраняет все свои элементы (иногда кроме сервисного байпаса). Поэтому выход из строя статического байпаса для такой системы просто мелкая неприятность.
На рисунке 20 приведена схема параллельной работы нескольких ИБП.
Рис.20. Параллельная работа ИБП
На рисунке приведена схема параллельной системы с раздельными сервисными байпасами. Схема система с общим байпасом вполне ясна и без чертежа. Ее особенностью является то, что для переключения системы в целом на сервисный байпас нужно управлять одним переключателем вместо нескольких. На рисунке предполагается, что между ИБП 1 и ИБП N Могут располагаться другие ИБП. Разные производителю (и для разных моделей) устанавливают свои максимальные количества параллеьно работающих ИБП. Насколько мне известно, эта величина изменяется от 2 до 8. Все ИБП параллельной системы работают на общую нагрузку. Суммарная мощность параллельной системы равна произведению мощности одного ИБП на количество ИБП в системе. Таким образом параллельная работа нескольких ИБП может применяться (и в основном применяется) не столько для увеличения надежности системы бесперебойного питания, но для увеличения ее мощности.
Рассмотрим режимы работы параллельной системы
Нормальная работа (работа от сети). Надежность
Когда в сети есть напряжение, достаточное для нормальной работы, выпрямители всех ИБП преобразуют переменное напряжение сети в постоянное, заряжая батареи и питая инверторы.
Инверторы, в свою очередь, преобразуют постоянное напряжение в переменное и питают нагрузку. Специальная управляющая электроника параллельной системы следит за равномерным распределением нагрузки между ИБП. В некоторых ИБП распределение нагрузки между ИБП производится без использования специальной параллельной электроники. Такие приборы выпускаются "готовыми к параллельной работе", и для использования их в параллельной системе достаточно установить плату синхронизации. Есть и ИБП, работающие параллельго без специальной электроники. В таком случае количество параллельно работающих ИБП – не более двух. В рассматриваемом режиме работы в системе допустимо несколько сбоев. Их количество зависит от числа ИБП в системе и действующей нагрузки.
Пусть в системе 3 ИБП мощностью по 100 кВА, а нагрузка равна 90 кВА. При таком соотношении числа ИБП и их мощностей в системе допустимы следующие сбои.
Сбой питания (исчезновение напряжения в сети)
Выход из строя любого из инверторов, скажем для определенности, инвертора 1. Нагрузка распределяется между двумя другими ИБП. Если в сети есть напряжение, все выпрямители системы работают.
Выход из строя инвертора 2. Нагрузка питается от инвертора 3, поскольку мощность, потребляемая нагрузкой меньше мощности одного ИБП. Если в сети есть напряжение, все выпрямители системы продолжают работать.
Выход из строя инвертора 3. Система переключается на работу через статический байпас. Нагрузка питается напрямую от сети. При наличии в сети нормального напряжения, все выпрямители работают и продолжают заряжать батареи. При любом последующем сбое (поломке статического байпаса или сбое сети) питание нагрузки прекращается. Для того, чтобы параллельная система допускала большое число сбоев, система должна быть сильно недогружена и должна включать большое число ИБП. Например, если нагрузка в приведенном выше примере будет составлять 250 кВА, то система допускает только один сбой: сбой сети или поломку инвертора. В отношении количества допустимых сбоев такая система эквивалентна одиночному ИБП. Это, кстати, не значит, что надежность такой параллельной системы будет такая же, как у одиночного ИБП. Она будет ниже, поскольку параллельная система намного сложнее одиночного ИБП и (при почти предельной нагрузке) не имеет дополнительного резервирования, компенсирующего эту сложность.
Вопрос надежности параллельной системы ИБП не может быть решен однозначно. Надежность зависит от большого числа параметров: количества ИБП в системе (причем увеличение количества ИБП до бесконечности снижает надежность – система становится слишком сложной и сложно управляемой – впрочем максимальное количество параллельно работающих модулей для известных мне ИБП не превышает 8), нагрузки системы (т.е. соотношения номинальной суммарной мощности системы и действующей нагрузки), примененной схемы параллельной работы (т.е. есть ли в системе специальная электроника для обеспечения распределения нагрузки по ИБП), технологии работы предприятия. Таким образом, если единственной целью является увеличение надежности системы, то следует серьезно рассмотреть возможность использование ИБП с горячим резервированием – его надежность не зависит от обстоятельств и в силу относительной простоты схемы практически всегда выше надежности параллельной системы.
Недогруженная система из нескольких параллельно работающих ИБП, которая способна реализвать описанную выше логику управления, часто также называется параллельной системой с резервированием.
Если нагрузка параллельной системы такова, что с ней может справиться меньшее, чем есть в системе количество ИБП, то инверторы "лишних" ИБП могут быть отключены. В некоторых ИБП такая логика управления подразумевается по умолчанию, а другие модели вообще лишены возможности работы в таком режиме. Инверторы, оставшиеся включенными, питают нагрузку. Коэффициент полезного действия системы при этом несколько возрастает. Обычно в этом режиме работы предусматривается некоторая избыточность, т.е. количестов работающих инверторов больше, чем необходимо для питания нагрузки. Тем самым обеспечивается резервирование. Все выпрямители системы продолжают работать, включая выпрямители тех ИБП, инверторы которых отключены.
В случае исчезновения напряжения в электрической сети, параллельная система переходит на работу от батареи. Все выпрямители системы не работают, инверторы питают нагрузку, получая энергию от батареи. В этом режиме работы (естественно) отсутствует напряжение в электрической сети, которое при нормальной работе было для ИБП не только источником энергии, но и источником сигнала синхронизации выходного напряжения. Поэтому функцию синхронизации берет на себя специальная параллельная электроника или выходная цепь ИБП, специально ориентированная на поддержание выходной частоты и фазы в соответствии с частотой и фазой выходного напряжения параллельно работающего ИБП.
Это режим, при котором вышли из строя один или несколько выпрямителей. ИБП, выпрямители которых вышли из строя, продолжают питать нагрузку, расходуя заряд своей батареи. Они выдает сигнал "неисправность выпрямителя". Остальные ИБП продолжают работать нормально. После того, как заряд разряжающихся батарей будет полностью исчерпан, все зависит от соотношения мощности нагрузки и суммарной мощности ИБП с исправными выпрямителями. Если нагрузка не превышает перегрузочной способности этих ИБП, то питание нагрузки продолжится (если у системы остался значительный запас мощности, то в этом режиме работы допустимо еще несколько сбоев системы). В случае, если нагрузка ИБП превышает перегрузочную способность оставшихся ИБП, то система переходит к режиму работы через статический байпас.
Если оставшиеся в работоспособном состоянии инверторы могут питать нагрузку, то нагрузка продолжает работать, питаясь от них. Если мощности работоспособных инверторов недостаточно, система переходит в режим работы от статического байпаса. Выпрямители всех ИБП могут заряжать батареи, или ИБП с неисправными инверторами могут быть полностью отключены для выполнения ремонта.
Работа от статического байпаса
Если суммарной мощности всех исправных инверторов параллельной системы не достаточно для поддержания работы нагрузки, система переходит к работе через статический байпас. Статические переключатели всех инверторов разомкнуты (исправные инверторы могут продолжать работать). Если нагрузка уменьшается, например в результате отключения части оборудования, параллельная система автоматически переключается на нормальный режим работы.
В случае одиночного ИБП с двойным преобразованием работа через статический байпас является практически последней возможностью поддержания работы нагрузки. В самом деле, ведь достаточно выхода из строя статического переключателя, и нагрузка будет обесточена. При работе параллельной системы через статический байпас допустимо некоторое количество сбоев системы. Статический байпас способен выдерживать намного больший ток, чем инвертор. Поэтому даже в случае выхода из строя одного или нескольких статических переключателей, нагрузка возможно не будет обесточена, если суммарный допустимый ток оставшихся работоспособными статических переключателей окажется достаточен для работы. Конкретное количество допустимых сбоев системы в этом режиме работы зависит от числа ИБП в системе, допустимого тока статического переключателя и величины нагрузки.
Если нужно провести с параллельной системой ремонтные или регламентные работы, то система может быть отключена от нагрузки с помощью ручного переключателя сервисного байпаса. Нагрузка питается от сети, все элементы параллельной системы ИБП, кроме батарей, обесточены. Как и в случае системы с горячим резервированием, возможен вариант одного общего внешнего сервисного байпаса или нескольких сервисных байпасов, встроенных в отдельные ИБП. В последнем случае при использовании сервисного байпаса нужно иметь в виду соотношение номинального тока сервисного байпаса и действующей мощности нагрузки. Другими словами, нужно включить столько сервисных байпасов, чтобы нагрузка не превышала их суммарный номинальных ток.
[ http://www.ask-r.ru/info/library/ups_without_secret_7.htm]Тематики
EN
Русско-английский словарь нормативно-технической терминологии > трехфазный источник бесперебойного питания (ИБП)
15 метод
1) expedient
2) manner
3) method
4) <electr.> mode
5) procedure
6) technique
– аксиоматический метод
– анаглифический метод
– вариационный метод
– весовой метод
– визуальный метод
– время-импульсный метод
– градиентный метод
– графический метод
– графоаналитический метод
– групповой метод
– дедуктивный метод
– иммерсионный метод
– импульсный метод
– интерференционный метод
– качественный метод
– кессонный метод
– количественный метод
– колориметрический метод
– комплексометрический метод
– кондуктометрический метод
– корреляционный метод
– косвенный метод
– лабораторный метод
– метод бестигельный
– метод Бормана
– метод Бриджмена
– метод взбалтывания
– метод возбуждения
– метод восходящий
– метод вращения
– метод врезания
– метод выбега
– метод годографа
– метод графов
– метод Грисса-Иловая
– метод дальномерно-базисный
– метод Дешана
– метод Дюма
– метод изинговский
– метод изображений
– метод импульсов
– метод инверсии
– метод испытаний
– метод истечения
– метод итерации
– метод Клегга
– метод консервирования
– метод конуса
– метод красок
– метод Марковица
– метод множителей
– метод накачки
– метод накопления
– метод наложения
– метод напыления
– метод обработки
– метод окаймления
– метод ОПВ
– метод осаждения
– метод осреднения
– метод отопления
– метод отражения
– метод перевала
– метод перемежающийся
– метод перпендикуляров
– метод площадей
– метод подбора
– метод подобия
– метод положения
– метод посева
– метод постулатов
– метод прерываний
– метод пристрелки
– метод проб
– метод прогонки
– метод продолжения
– метод равносигнальный
– метод радиоавтографии
– метод разбавления
– метод разделения
– метод разливки
– метод размерностей
– метод решета
– метод Рунге-Кутта
– метод свилей
– метод секущих
– метод сетки
– метод сеток
– метод сечений
– метод сил
– метод совмещения
– метод совпадений
– метод сплавления
– метод Степанова
– метод стрельбы
– метод триангуляции
– метод трилатерации
– метод узлов
– метод Уизема
– метод уравновешивания
– метод установления
– метод частиц
– метод Шора
– метод электрофореза
– метод эстафеты
– ненулевой метод
– неразрушающий метод
– нерекурсивный метод
– неточный метод
– нефелометрический метод
– нулевой метод
– обратно-ступенчатый метод
– объективный метод
– объемный метод
– операторный метод
– пикнометрический метод
– порошковый метод
– приближенный метод
– прямой метод
– радиационный метод
– радиометрический метод
– разностный метод
– разрушающий метод
– рентгеноструктурный метод
– ресонансный метод
– рупорно-линзовый метод
– симболический метод
– спектроскопический метод
– статистический метод
– стробоскопический метод
– струйный метод
– ступенчатый метод
– субъективный метод
– табличный метод
– теневой метод
– топологический метод
– точный метод
– финитный метод
– флотационный метод
– цепной метод
– численный метод
– шуповой метод
– эмпирический метод
– энергетический метод
– эргатический метод
– эскалаторный метод
абсолютный метод измерения — absolute method of measurement
дальномерный метод навигации — rho-rho navigation
дифференцированный метод контроля — differential control method
кислотный метод испытаний — acid test
косвенный метод измерения — indirect method of measurement
метод амплитудного анализа — kick-sorting method
метод анализа узловой — <tech.> nodal analysis
метод аналитической вставки — cantilevel extension
метод аппроксимации отображаемых поверхностей сплайнами — spline surface technique
метод быстрейшего спуска — steepest descent method
метод вариации постоянных — method of variation of parameters
метод ветвей и границ — branch and bound method, branch-and-bound, <math.> branch-and-bound method
метод ветвления и ограничения — branch and bound method
метод взаимных градиентов — <math.> conjugate-gradient method
метод воздушной проекции — aero-projection method
метод возможных направлений — <math.> method of feasible directions
метод времени пролета — time-of-flight method
метод встречного включения — <tech.> opposition method
метод встречного фрезерования — conventional milling method
метод гармонического баланса — describing function method
метод двух узлов — nodal-pair method
метод дирекционных углов — method of gisements
метод запаса прочности — load factor method
метод зеркальных изображений — method of electrical images
метод зонной плавки — floating-zone method
метод избыточных концентраций — isolation method
метод измерения по точкам — point-by-point method
метод изотопных индикаторов — tracer method
метод искаженных волн непрерывного спектра — <phys.> continuous-distorted-wave approximation
метод испытательной строки — test-line method
метод итераций Гаусса-Зайделя — <math.> Gauss-Seidel iteration
метод качающегося кристалла — rotating-crystal method
метод качающейся частоты — <electr.> wobbulator method
метод кольца и шара — ball-and-ring method
метод комбинирования для получения оптимальных вариантов — mix-and-match technique
метод конечных разностей — finite difference method
метод конечных элементов — <math.> finite element method
метод контроля качества — quality control method
метод контурного анализа — <tech.> loop analysis
метод контурных токов — mesh-current method
метод корневого годографа — root-locus method
метод крупных частиц — <math.> particle-in-cell method
метод лаковых покрытий — brittel-varnish method
метод линейной интерполяции — method of proportional parts
метод ложного положения — <math.> method of false position
метод лучевого зондирования — ray-trace method
метод магнитного порошка — magnetic particle method
метод малого параметра — pertubation theory
метод малых возмущений — perturbation method
метод механической обработки — machining method
метод моментных площадей — area moment method
метод нагретой нити — <phys.> hot-wire technique
метод наибольшего ската — saddle-point method
метод наименьших квадратов — method of least squares
метод наискорейшего спуска — <math.> method of steepest descent
метод наихудшего случая — <math.> worst-case method
метод наружных зарядов — adobe blasting method
метод неподвижных точек — method of fixed points
метод нивелирования по частям — method of fraction levelling
метод нулевого отклонения — <tech.> zero deflection method
метод нулевых биений — zero-beat method
метод нулевых точек — neutral-points method
метод нулей Барле — <phys.> Barrelet method of zeroes
метод обеспечения надежности — reliability method
метод обогащения данных — data enrichment method
метод обратной задачи — <math.> inverse-scattering method
метод одного отсчета — total value method
метод ортогонализованных плоских волн — <opt.> orthogonalized-plane-wave method
метод особых возмущений — singular perturbation method
метод отбора проб — sampling method
метод относительных приростов — <engin.> method of incremental rates
метод отраженных волн — < radio> reflected wave method
метод отраженных импульсов — pulse-echo method
метод падающего тела — falling body method
метод параллельного действия — parallel mode
метод парамагнитного резонанса — paramagnetic-resonance method
метод первого приближения — first approximation method
метод передачи совместных значений — <comput.> composite value method
метод переменной плотности — <phot.> movietone
метод переменных направлений — <math.> ADI method, alternating direction method
метод перераспределения моментов — moment distribution method
метод пересекающихся дучей — crossed beam method
метод переходного состояния — transition state method
метод перспективных сеток — grid method
метод плавающей зоны — <metal.> floating zone melting
метод планирования балансовый — <econ.> balance-chart method of planning
метод подвижного или передвигающего наблюдателя — moving-observer technique
метод покоординатного спуска — <math.> alternating-variable descent method
метод полной деформации — total-strain method
метод половинных отклонений — half-deflection method
метод полярных координат — polar method
метод попутного фрезерования — climb milling method
метод последовательного счета — incremental method
метод последовательных исключений — successive exclusion method
метод последовательных поправок — successive correction
метод последовательных элиминаций — method of exhaustion
метод послесплавной диффузии — post-alloy-diffusion technique
метод предпоследнего остатка — <math.> method of penultimate remainder
метод приближения объемного заряда с резкой границей — abrupt space-charge edge
метод пробных выборок — <math.> model sampling
метод прогноза и коррекции — <math.> predictor-corrector method
метод программирующих программ — programming program method
метод пространств входных массивов — <comput.> input space approach
метод равносигнальной зоны — lobing
метод равных высот — equal-altitude method
метод равных деформаций — equal-strain method
метод равных отклонений — <tech.> equal deflection method, equal-deflection method
метод разделения переменных — method of separation of variable
метод разрушающей нагрузки — load-factor method
метод растрового сканирования — raster-scan method
метод сдвинутого сигнала — offset-signal method
метод селекции мод — mode selecting technique
метод серого клина — gray-wedge method
метод сжатия импульсов — pulse compression technique
метод симметричных составляющих — method of symmetrical components
метод синхронизации мод — mode-locking technique
метод синхронизации фаз — phase-locking technique
метод синхронного накопления — synchronous storage method
метод сканирования полосой — single-line-scan television meth
метод сканирования пятном — spot-scan photomultiplier method
метод сквозного счета — <phys.> shock-capturing method
метод скользящего окна — <math.> data windowing
метод скользящих средних — <math.> moving average method, moving-average method
метод скорейшего спуска — <math.> method of steepest descent
метод совместных значений — <comput.> composite value method
метод сопряженных градиентов — <math.> method of complex gradients
метод сопряженных уравнений — <math.> adjoint method
метод сосредоточенных параметров — lumped-parameter method
метод составного стержня Гопкинсона — Hopkinson split-bar method
метод спадания заряда — fall-of-charge method
метод спирального сканирования — spiral-scan method
метод сравнений по модулю 9 — <math.> casting out nines
метод средних квадратов — midsquare method
метод сухого озоления — dry combustion method
метод сухого порошка — dry method
метод точечного вплавления — dot alloying method
метод трех баз — three-base method
метод угловой деформации — slope-deflection method
метод угловой модуляции — angular modulation method
метод удаляемого маски — rejection mask method
метод удаляемого трафарета — rejeciton mask method
метод узлового анализа — <tech.> nodal analysis
метод узловых потенциалов — node-voltage method
метод унифицированных модулей — building-block method
метод уравнивания по направлениям — method of directions
метод уравнивания по углам — method of angles
метод фазовой плоскости — phase plane method
метод фазовых функций — <phys.> variable-phase method
метод чередущихся направлений — <math.> ADI method, alternating direction method
метод эффективного пространства — effective medium approach
непосредственный метод отыскания производной — delta method
основанный на переходе к сравнениям метод проверки — casting out
относительный метод измерения — relative method of measurement
панельный метод испытаний — panel-spalling test
параллельно-последовательный метод выполнения операций — parallel-serial mode
прессование металла обратным метод — inverse extrusion
прямой метод измерения — direct method of measurement
угломерный метод навигации — theta-theta navigation
16 (проф.) объектный модуль
General subject: object module (файл с объектным кодом, получаемый после трансляции исходного текста программы. После этапа компоновки объектных модулей с процедурами из библиотек (например, поддержки времени исполнения) по)Универсальный русско-английский словарь > (проф.) объектный модуль
17 объектный модуль
1) General subject: (проф.) object module (файл с объектным кодом, получаемый после трансляции исходного текста программы. После этапа компоновки объектных модулей с процедурами из библиотек (например, поддержки времени исполнения) по)2) Information technology: object module3) SAP.tech. maximum object18 группа
ж.1) group2) (частиц, волн) batch, cluster, bunch, train3) ( сотрудников) team, group, crew•- абелева группа
- абстрактная группа
- абстрактно-неизоморфная группа
- аддитивная группа
- антиунитарная группа
- асимморфная группа
- атомная группа
- безразмерная группа
- белая группа
- бесконечная группа
- бесконечномерная группа Ли
- бесконечномерная конформная группа
- биполярная группа
- боковая группа
- вещественная группа
- вложенная группа
- внутренняя группа
- внутрикомплексная группа
- волновая группа
- высокоэнергетическая группа
- гексагонально-дипирамидальная группа
- гексагонально-пирамидальная группа
- гексагонально-трапецоэдрическая группа
- гексаоктаэдрическая группа
- гексатетраэдрическая группа
- гемисимморфная группа
- гетероциклическая группа
- гидроксильная группа
- гидрофильная группа
- гидрофобная группа
- глобальная группа
- голоэдрическая точечная группа
- гомотопическая группа
- градуированная группа Ли
- группа актиноидов
- группа альфа-частиц
- группа антисимметрии
- группа античастиц
- группа аромата
- группа атомов
- группа бесконечного порядка
- группа бозонной симметрии
- группа Браве
- группа быстрых нейтронов
- группа вакансий
- группа Вейля
- группа великого объединения
- группа внутренней симметрии
- группа волн
- группа волновых пакетов
- группа вращений и отражений
- группа вращений окружности
- группа вращений сферы
- группа вращений
- группа всех вещественных чисел
- группа всех комплексных чисел
- группа вторичных ионов
- группа галактик
- группа Галуа
- группа голономии
- группа гомологий
- группа движений евклидовых пространств
- группа движений окружности
- группа движений пространства-времени
- группа движений
- группа де Ситтера
- группа динамической симметрии
- группа дискретных плоских вращений
- группа дискретных трансляций
- группа диффеоморфизмов
- группа длинопробежных частиц
- группа доменов
- группа замедлителя
- группа запаздывающих нейтронов
- группа изотропии
- группа импульсов
- группа инвариантности
- группа инверсии
- группа ионов
- группа калибровочных преобразований
- группа киральной симметрии
- группа классов диффеоморфизмов
- группа когомологий
- группа колодцев
- группа лантаноидов
- группа лёгких ядер
- группа Ли - Ритта - Колчина
- группа Ли
- группа линейных операторов
- группа линейных преобразований
- группа Лоренца
- группа модулей
- группа монодромии
- группа неинвариантности
- группа нейтронов
- группа обменной симметрии
- группа операторов
- группа ортогональных преобразований
- группа отражений Вейля
- группа отражений
- группа очень тяжёлых ядер
- группа перенормировок
- группа переносов
- группа перестановок
- группа перехода
- группа переходных металлов
- группа петель
- группа плоских вращений
- группа поворотов плоскости
- группа подстановок
- группа порядка n
- группа преобразований симметрии
- группа преобразований цвета
- группа преобразований
- группа проективной унитарной симметрии
- группа протонов
- группа Пуанкаре
- группа пятен типа альфа
- группа пятен
- группа растяжений
- группа редкоземельных элементов
- группа резонансных нейтронов
- группа с разветвлённой цепью
- группа с сопряжёнными двойными связями
- группа самых тяжёлых ядер
- группа сдвигов
- группа симметрии взаимодействия
- группа симметрии молекул
- группа симметрии
- группа скрытой симметрии
- группа солнечных пятен
- группа средних ядер
- группа стержней
- группа суперсимметрии
- группа счётчиков
- группа тепловыделяющих элементов
- группа точек
- группа точной симметрии
- группа трансляций
- группа трёхмерных вращений
- группа тяжёлых ядер
- группа унитарной симметрии
- группа унитарных преобразований
- группа цвета
- группа цветной симметрии
- группа целых чисел
- группа частиц
- группа электронов и позитронов
- группа электрослабого взаимодействия
- группа ядер гелия
- группа ядер
- группа, гомоморфная группе
- группа, изоморфная группе
- дважды периодическая группа
- двумерная группа
- двумерная точечная группа
- двумерно периодическая группа
- дигексагонально-пирамидальная группа
- дидодекадрическая группа
- динамическая группа симметрии
- динамическая группа
- дискретная группа
- дискретная калибровочная группа
- дитетрагонально-дипирамидальная группа
- дитетрагонально-пирамидальная группа
- дитригонально-дипирамидальная группа
- дитригонально-пирамидальная группа
- дитригонально-скаленоэдрическая группа
- диффузионная группа
- диэдрическая безосная группа
- диэдрическая осевая группа
- дуальная группа
- евклидова группа
- единая группа симметрии
- единичная группа
- замещающая группа
- знакопеременная группа
- изоморфная группа
- изоспиновая группа
- изотропная группа
- исключительная группа
- исследовательская группа
- калибровочная группа
- квантовая группа
- квантово-механическая группа
- коллинеарная группа
- коммутативная группа
- компактная группа Ли
- компактная группа
- комплексная группа
- конечная группа
- конечномерная группа Ли
- конформная группа
- концевая группа
- кратно-транзитивная группа
- кристаллографическая пространственная группа
- кристаллографическая точечная группа
- лауэвская группа симметрии
- линейно упорядоченная группа
- локальная группа
- локально-изоморфная группа Ли
- локально-компактная группа
- локально-конечная группа
- магнитная группа
- матричная группа
- местная группа галактик
- метаплектическая группа
- многосвязная группа
- многочастичная группа
- модулярная группа
- моноэдрическая группа
- мультипликативная группа
- накрывающая группа
- неабелева группа
- нейтральная группа антисимметрии
- некоммутативная группа
- некомпактная группа
- некристаллографическая группа
- неоднородная группа Лоренца
- неоднородная симплектическая группа
- непрерывная группа
- несимморфная группа
- нильпотентная группа
- нормальная группа
- обобщённая группа
- объединяющая группа
- одномерная группа
- одномерно периодическая группа
- однопараметрическая группа
- односвязная группа Ли
- одноцветная группа антисимметрии
- одноэлементная группа
- ортогональная группа
- ортохронная группа
- очарованная унитарная группа
- параметризованная группа
- пептидная группа
- перестановочно-инверсионная группа
- периодическая группа
- пинакоидальная группа
- полная группа симметрии
- полная линейная группа
- полная матричная группа
- полупростая группа Ли
- полупростая группа
- полярная группа
- предельная группа симметрии
- предельная группа
- предельная точечная группа
- призматическая группа
- примитивная группа
- проективная группа
- простая группа Ли
- пространственная группа антисимметрии
- пространственная группа симметрии
- пространственная группа
- пространственная трижды периодическая группа
- псевдоортогональная группа
- псевдоунитарная группа
- радикальная группа
- разрешимая группа
- расширенная группа
- редкоземельная группа
- релятивистская группа
- ренормализационная группа Гелл-Манна - Лоу
- ренормализационная группа
- ромбо-дипирамидальная группа
- ромбо-пирамидальная группа
- ромбо-тетраэдрическая группа
- ромбоэдрическая группа
- связная группа
- серая группа антисимметрии
- серая группа
- сжатая группа
- симметричная группа
- симморфная группа
- симморфная фёдоровская группа
- симплектическая группа
- сложная группа
- собственная группа вращений
- собственная группа
- сопряжённая группа
- спиральная группа симметрии
- старшая группа
- структурная группа расслоения
- структурно-упорядоченная группа
- суперконформная группа
- тетрагонально-дипирамидальная группа
- тетрагонально-пирамидальная группа
- тетрагонально-скаленоэдрическая группа
- тетрагонально-тетраэдрическая группа
- тетрагонально-трапецоэдрическая группа
- техницветовая группа
- топологическая группа
- точечная группа направлений
- точечная группа симметрии
- точечная группа
- трёхмерная группа вращений
- трёхмерная группа
- тривиальная группа
- тригонально-дипирамидальная группа
- тригонально-пирамидальная группа
- тригонально-трапецоэдрическая группа
- триоктаэдрическая группа
- тритетраэдрическая группа
- универсальная накрывающая группа
- унимодулярная группа
- униполярная группа
- унитарная группа
- фёдоровская группа
- фёдоровская пространственная группа
- фундаментальная группа пространства Х
- фундаментальная группа
- функциональная группа
- хелатная группа
- цветная хиггсовская группа
- цветовая группа симметрии
- цветовая группа
- циклическая группа
- цилиндрическая группа симметрии
- чёрно-белая группа
- чёрно-белая точечная группа антисимметрии
- шубниковская группа
- электрослабая группа симметрии
- энантиоморфная пространственная группа
- энергетическая группа19 гибкая производственная система
экон. гибкая производственная система
Flexible Manufacturing System (FMS)
(совокупность в разл. сочетаниях оборудования с числовым программным управлением, работизированных технологических комплексов, гибких производственных модулей, отдельных ед. технол. оборудования, систем обеспечения функционирования ГПС в автомат. режиме в течение заданного интервала времени. ГПС обладает свойством автоматизированной переналадки при произ-ве изделий произвольной номенклатуры в установленных пределах значений их характеристик)Дополнительный универсальный русско-английский словарь > гибкая производственная система
20 ГПС
экон. гибкая производственная система
Flexible Manufacturing System (FMS)
(совокупность в разл. сочетаниях оборудования с числовым программным управлением, работизированных технологических комплексов, гибких производственных модулей, отдельных ед. технол. оборудования, систем обеспечения функционирования ГПС в автомат. режиме в течение заданного интервала времени. ГПС обладает свойством автоматизированной переналадки при произ-ве изделий произвольной номенклатуры в установленных пределах значений их характеристик)Дополнительный универсальный русско-английский словарь > ГПС
Страницы- 1
- 2
См. также в других словарях:
Операционная система реального времени — Запрос «ОСРВ» перенаправляется сюда; о советском клоне системы RSX 11 см. ОСРВ СМ ЭВМ. Операционная система реального времени, ОСРВ (англ. Real Time Operating System) тип операционной системы. Есть много определений термина, по сути… … Википедия
ОС реального времени — Операционная система реального времени, ОСРВ (англ. Real Time Operating System) тип операционной системы. Есть много определений термина, по сути похожих друг на друга. Самые распространённые из них: Операционная система, в которой успешность… … Википедия
Операционные системы реального времени — Операционная система реального времени, ОСРВ (англ. Real Time Operating System) тип операционной системы. Есть много определений термина, по сути похожих друг на друга. Самые распространённые из них: Операционная система, в которой успешность… … Википедия
масштабирование по времени работы на аккумуляторах — Параллельные тексты EN RU Scalable Runtime Additional Battery Modules increase runtime. Modules are added or moved while systems are running and protected. Масштабирование по времени работы на аккумуляторах Увеличение времени работы на… … Справочник технического переводчика
перечень модулей данных, хранящихся в ОБДЭ — 3.3.6 перечень модулей данных, хранящихся в ОБДЭ; ПМДО (CSDB Status List, CSL): Документ, содержащий полный список модулей данных, хранящихся в ОБДЭ на текущий момент времени, и позволяющий оценивать актуальность и полноту ОБДЭ. 3.3.7 Источник:… … Словарь-справочник терминов нормативно-технической документации
Библиотека времени исполнения — У этого термина существуют и другие значения, см. библиотека (значения). Библиотека времени исполнения (также библиотека времени выполнения; англ. runtime library, RTL) набор библиотек (модулей) той или иной системы программирования,… … Википедия
Международная космическая станция — Запрос «МКС» перенаправляется сюда; см. также другие значения. Международная космическая станция … Википедия
The Word (ПО) — У этого термина существуют и другие значения, см. The Word (значения). «The Word» Тип Библейское ПО Разработчики Costas Stergiou. Версия 3.0x … Википедия
массив электропитания — [Интент] Для индивидуальных пользователей единственным устройством, реально нуждающимся в такой защите, является компьютер. В корпоративной среде, кроме ПК, в обеспечении качественного электропитания нуждаются серверы, коммуникационное… … Справочник технического переводчика
МКС — Запрос «МКС» перенаправляется сюда. См. также «МКС (значения)» Международная космическая станция Фото МКС: 25 марта 2009 года Эмблема МКС … Википедия
Цифровой сигнальный процессор — (англ. Digital signal processor, DSP; сигнальный микропроцессор, СМП; процессор цифровых сигналов, ПЦС) специализированный микропроцессор, предназначенный для цифровой обработки сигналов (обычно в реальном масштабе времени) … Википедия
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.
Перевод: со всех языков на английский
с английского на все языки- С английского на:
- Все языки
- Со всех языков на:
- Все языки
- Английский
- Немецкий
- Русский
- Французский